Opportunity
ferngesteuerter Mars-Rover der NASA Aus Wikipedia, der freien Enzyklopädie

Opportunity (englisch für Chance/Gelegenheit) war ein US-amerikanischer Erkundungsroboter zur geologischen Erforschung des Mars, der von 2004 bis 2018 aktiv war. Die Sonde wurde von der NASA am 7. Juli 2003 im Rahmen des Mars-Exploration-Rover-Programm gestartet. Sein ursprünglicher Name lautete deswegen auch Mars Exploration Rover B (MER-B) und wurde dann später in Opportunity geändert.
| Opportunity | |
|---|---|
 Mars Rover Opportunity (MER-B), künstlerische Darstellung | |
| NSSDC ID | 2003-032A |
| Missionsziel | Mars, Meridiani Planum |
| Betreiber | NASA |
| Trägerrakete | Delta II 7925 „Heavy“ |
| Startmasse | 1063 kg |
| Verlauf der Mission | |
| Startdatum | 7. Juli 2003 |
| Startrampe | Cape Canaveral, LC-17B |
| Enddatum | 10. Juni 2018 (letzter Kontakt), 13. Februar 2019 (Versuche zur Kontaktaufnahme beendet) |





Sie landete am 25. Januar 2004 erfolgreich in einem kleinen Krater (in der Tiefebene Meridiani Planum), den die NASA später Eagle Crater taufte. Obwohl Opportunity nur für eine Missionsdauer von 90 sol ausgelegt war, blieb sie 5111 sol bis zum 10. Juni 2018 aktiv. Ihre Mission endete nach 14 Jahren und 219 Tagen, als die Sonde nach einem Staubsturm nicht wieder aus dem Ruhezustand aufgeweckt werden konnte. In dieser Zeit legte Opportunity eine Strecke von 45,16 km zurück.[1] Die NASA erklärte am 13. Februar 2019, dass das Programm erfolgreich beendet wurde, nachdem alle Kommunikationsversuche mit der Sonde fehlgeschlagen seien.
Die Schwestersonde Spirit (MER-A) landete am 4. Januar 2004 im Gusev-Krater und war bis zum 22. März 2010 aktiv.
Ziele der Mission
Zusammenfassung
Kontext
Ziel der Sonde Opportunity (MER-B) und ihrer Schwestersonde Spirit (MER-A) war die Landung und geologische (eigentlich: areologische) Erkundung in Gebieten, die von den früheren Marsorbitern der NASA nach der follow-the-water-Strategie („folge dem Wasser“) als möglicherweise ehemals wasserführend erkannt worden waren. Sie wiesen Linienstrukturen oder Mineralien auf, die auf den Einfluss flüssigen Wassers oder vielleicht sogar auf ehemals offene Wasserflächen schließen ließen. Für Opportunity war eine Landestelle nahe dem planetaren Äquator auf der Tiefebene Meridiani Planum ausgewählt worden, weil dort ausgedehnte Vorkommen von Hämatit an der Oberfläche erkennbar waren. Hämatit kann unter anderem in offenem Wasser oder auch hydrothermal entstehen. Ein weiterer interessanter Aspekt für die Auswahl dieses Gebietes war wohl, dass ein Orbiter dort eine fast plan liegende, offenbar sehr fein geschichtete helle Gesteinsformation entdeckte, wenngleich dies vorab offiziell nie bestätigt wurde. Ob diese Gesteine allerdings äolische (windabgelagerte) oder aquatische (wasserabgelagerte) Sedimente darstellen oder ob sie Tuffite (Vulkanaschen), helle Vulkanitdecken (Lava) beziehungsweise besondere Impaktite (geschichtete Ablagerungen von sogenannten „Gesteinswolken“ aus Meteoriteneinschlägen) sind, war vor der Untersuchung am Marsboden noch völlig offen.
Die Missionsdauer sollte anfangs garantierte 90 Marstage[2] betragen (90 Sol entsprechen knapp 92,5 Erd-Tagen), doch hatte Opportunity diese weit übertroffen. Die Mission wurde regelmäßig verlängert.[3] Bei der Gesamtstrecke überschritt der Rover am 27. Juli 2014 die Marke von 40 km. Damit fuhr er die weiteste jemals zurückgelegte Strecke auf einem fremden Himmelskörper.[4] Bis Juni 2018 wurden 45,16 km zurückgelegt.[5]
Technik der Sonde
Zusammenfassung
Kontext
Die beiden Rover Spirit und Opportunity waren baugleich. Deshalb findet sich eine genauere Beschreibung der Technik unter Mars Exploration Rover (MER).
Im Gegensatz zu Mars Pathfinder war Opportunity keine feststehende Bodenstation, sondern ein fahrbarer Roboter, „Rover“ genannt. Er war 1,6 m lang, bis 1,5 m hoch und 185 kg schwer. Laut Spezifikation sollte er in der Lage sein, je nach Oberflächenbeschaffenheit am Tag etwa 100 m, insgesamt etwa 3 km zurückzulegen und bis zu sechs Monate auf der Planetenoberfläche einsatzfähig zu bleiben. Dies übertraf die Fähigkeiten des Vorgängers Sojourner von der Mars-Pathfinder-Mission 1997 etwa um den Faktor 60. Der Rover wurde von der NASA selbst als „Robotergeologe“ (robotic geologist) bezeichnet und besaß sechs unabhängig voneinander angetriebene Räder an stelzenförmigen Teleskopbeinen. Er trug neben verschiedenen Panorama- (pancam), Navigations- (navcam) und Gefahrenerkennungskameras (hazcams – hazard recognition cameras) einen schwenkbaren Arm mit einem Gesteinsmikroskop (ebenfalls mit Kamera), mehreren Spektrometern (Mößbauer, Alpha-Partikel, Infrarot) und einem mechanischen Werkzeug, das in der Lage war, Gesteinsoberflächen abzubürsten und auf einigen Quadratzentimetern mehrere Millimeter tief anzubohren, um auch das Innere erreichbarer Gesteine untersuchen zu können (RAT – rock-abrasion-tool). Die Räder wurden einzeln bewegt und dienen nicht nur zur Fortbewegung, sondern konnten auch als Schürfgeräte eingesetzt werden, um den Untergrund aufzuwühlen und damit einige Zentimeter des Bodenprofils mechanisch und fotografisch zu untersuchen. Der Rover besaß über Solarpaneele aufladbare Batterien und wurde zur Energieeinsparung nachts in einen Ruhezustand versetzt. Mit Hilfe seiner Antennen konnte das Gerät Bilder und Messergebnisse entweder an die als Zwischenstationen zur Erde verwendeten umlaufenden Orbiter der NASA und der ESA oder direkt zur Erde senden sowie Befehle von dort empfangen. Wegen der relativ langen Laufzeit der Signale von der Erde musste der Rover mit seinen Bordcomputern in gewissem Umfang autonom agieren können.
Verlauf der Mission
Zusammenfassung
Kontext
.jpg)
Opportunity startete am 7. Juli 2003 erfolgreich mit einer Delta-II-7925H-Trägerrakete und landete am frühen Morgen des 25. Januar 2004 (6:05 Uhr MEZ) in der Meridiani-Planum-Tiefebene des Mars. Im Gegensatz zu früheren Missionen wurde der Lander nicht aus einer Umlaufbahn abgesetzt, sondern direkt aus seiner Flugbahn heraus mit einer Fehlertoleranz von wenigen Kilometern auf den Planeten niedergebracht, was äußerste Zielgenauigkeit im Anflug erforderte. Die Sonde wurde, durch einen Hitzeschild geschützt, zunächst in der Atmosphäre bis auf Schallgeschwindigkeit abgebremst. Dann entfaltete sich ein Fallschirm, an dessen Leinen ein Raketensystem oberhalb der Sonde angebracht war, das horizontale Bewegungen in der Atmosphäre ausgleichen sollte. Kurz vor dem Aufsetzen wurden schlagartig schützend das um die Sonde gelegte, von ILC Dover entwickelte, Airbaglandesystem aufgeblasen. Nach dem Aufsetzen hüpfte der Lander auf den Airbags noch etliche Male über die Oberfläche, bis er in einem kleinen Krater zum Stillstand kam. Nach Entleeren der Airbags und Öffnen der Landekapsel offenbarten die ersten Fotos des Rovers nie gesehene Strukturen am Rand des kleinen Kraters, die eines der wichtigsten Beobachtungsobjekte für Opportunity werden sollten. Sie zeigten, dass die Sonde in denkbar günstiger Position nur wenige Meter neben einem offen zutage liegenden Anschnitt der anvisierten hellen Gesteinsformation gelandet war.
Erstes Halbjahr 2004 (Sol 0 bis 153) – Primärmission
Nach mehreren Tagen wurde der Rover auf seiner Landeplattform (inzwischen benannt als Challenger Memorial station) entfaltet und konnte diese über eine heruntergeklappte Rampe verlassen. Der Boden des Kraters, der Eagle-Krater benannt wurde, war übersät mit kleinen Kügelchen, Blueberries genannt. Im Krater waren auch noch die Abdrücke der Landeairbags deutlich zu sehen. Eine Aufnahme des Infrarotspektrometers MiniTES zeigte die Hämatitverteilung innerhalb des Kraters. Dort, wo der Airbag aufgetroffen war, wurde kein Hämatit gefunden. Anscheinend wurden die Blueberries von den Airbags in den Boden gedrückt und konnten so vom MiniTES nicht gefunden werden. Eine spätere Untersuchung einer Ansammlung von Blueberries mit dem Mößbauer-Spektrometer ergab ebenfalls, dass diese Kügelchen aus Hämatit bestehen.
In nur wenigen Metern Entfernung wurde am Kraterrand geschichtetes Gestein gefunden, bei der die einzelnen Lagen nur wenige Millimeter dick waren. Dies bedeutete für Geologen den Vorteil, Gestein dort zu untersuchen, wo es auch entstanden war. Die Blueberries waren teilweise in diese Gesteinsschichten eingebettet oder lagen davor verstreut. Dies deutet auf die Bildung der Blueberries innerhalb des Gesteins hin. Bei der Untersuchung des Gesteins mit dem APXS und dem Mößbauer-Spektrometer wurden Hinweise darauf gefunden, dass es Jarosit enthält. Dieses Kalium-Eisen-Sulfat-Hydroxid bildet sich meist in einer wasserreichen Umgebung. Bei einigen der Schichten konnte man geriffelte und sich überkreuzende (cross-bedding) Strukturen ausmachen, die sich üblicherweise in fließendem Wasser bilden. In einem Aufschluss namens El Capitain wurden schmale längliche Hohlräume gefunden. Diese Räume entstehen, wenn sich Kristalle im Gestein bilden und dann herauserodiert werden. Zudem wurde, um den Boden zu untersuchen, mit dem rechten Vorderrad ein 50 cm langer und 10 cm tiefer Graben gegraben; auch hier wurden die Blueberries gefunden. Zudem wurde festgestellt, dass der Boden eine sehr klumpige Struktur hat.
Nach einer zweimonatigen Untersuchung verließ Opportunity den Krater. Um herauszufinden, ob die gefundenen Belege für flüssiges Wasser nur lokal oder in der ganzen Region zu finden waren, wurde als nächstes Ziel ein 750 m entfernter Krater bestimmt. Dieser wurde nach dem Forschungsschiff Endurance benannt, das bei der Imperialen Transantarktis-Expedition unter der Leitung des britischen Polarforschers Ernest Shackleton zum Einsatz kam. Auch andere untersuchte Krater erhielten Namen berühmter Forschungsschiffe.
Auf der Fahrt dorthin konnte ein Stein namens Bounce Rock untersucht werden. Dieser war zufälligerweise durch den Aufprall des Landeairbags getroffen worden und wurde dabei aufgebrochen. Der Stein hat eine vulkanische Natur und starke Ähnlichkeit zu den Shergottiten, einer Untergruppe der sogenannten Marsmeteoriten. Man nahm an, dass er durch einen Einschlag aus einem relativ frischen Einschlagkrater 75 km südwestlich vom Eagle-Krater herausgeschleudert wurde.[6]
Der Rover konnte teilweise Strecken bis zu 100 m pro Marstag zurücklegen und kam so in der flachen Ebene sehr gut voran. Unterwegs wurden an einer Stelle namens Anatolia Spalten oder Risse entdeckt, die entweder tektonisch entstanden sein konnten oder durch eine Serie von Einschlagkratern gebildet wurden. Auch bei einem kleineren Krater namens Fram konnte schwefel-, chlor- und bromreiches anstehendes Gestein entdeckt werden.[7] Dies gab einen Hinweis darauf, dass es einmal sehr viel Oberflächenwasser gegeben haben muss, welches die gesamte Meridiani-Ebene bedeckte.
Ende April 2004 erreichte Opportunity den Endurance-Krater. Um das Kraterinnere zu beobachten und eine eventuelle Einfahrstelle zu entdecken, fuhr der Rover zuerst am Kraterrand entlang. Im Innern zeigten sich die erhofften tieferen Schichtungen, der Boden selbst war durch Sanddünen bedeckt. Deshalb entschied man bei der NASA, den Rover in den Krater hineinzuschicken, auch auf die Gefahr hin, dass er nicht mehr herauskommen könnte. Am 10. Juni begannen Ingenieure der NASA, einige Abstiegsversuche in den Krater hinein und wieder hinaus mit dem Rover zu machen, da noch nicht klar war, ob und wie gut Opportunity mit dem Untergrund zurechtkommen würde. Nach zwei erfolgreichen Fahrversuchen fuhr der Rover an Sol 133 an einem Ort namens Karatepe tiefer in den Krater hinein.
Zweites Halbjahr 2004 (Sol 154 bis 332) – Endurance-Krater
Nun begann die Untersuchung der Schichten des Endurance-Kraters, der ca. 12 m tief ist. Jede Schicht wurde fotografiert, und an etlichen Stellen wurden mit dem Steinschleifwerkzeug Löcher in das Gestein gebohrt. Dadurch konnte eine Stratigraphie des Bodens der Meridiani-Ebene erstellt werden. Bis Mitte August (Sol 192) analysierte der Rover die einzelnen Schichten bis fast zu den Dünen am Boden. Die Untersuchung der Dünen selbst wurde jedoch als zu gefährlich angesehen, da die Räder des Rovers sich in den Dünen festfahren könnten. Während der Fahrt an den Hängen des Kraters rutschen die Räder des Rovers teilweise stark, so dass sich das genaue Positionieren an interessanten Objekten sehr schwierig gestaltete.
Eine Steinformation namens Escher am südwestlichen Hang des Kraters wurde genauer unter die Lupe genommen. Dieser Stein enthielt Bruchlinien, die die Oberfläche in Polygone unterteilten. Diese Bruchlinien konnten entweder bei einem Einschlag entstanden sein oder durch Wassereinfluss und spätere Austrocknung. Mitte September 2004 trat die solare Konjunktion ein, d. h., die Sonne war zwischen Mars und Erde, so dass während etwa zwei Wochen nicht mit der Sonde kommuniziert werden konnte. Auf dem Weg zum Burns Cliff, einem Steilhang am Kraterrand, wurde der 1 m Durchmesser messende große Fels Wopmay untersucht. Dessen ungewöhnliche Oberfläche wies, ebenso wie Escher, die Möglichkeit von starkem Wassereinfluss auf. Die Schichtungen von Burns Cliff konnten aufgrund der zu steilen Umgebung nicht erreicht werden. Stattdessen wurde davon ein umfangreiches Panorama erstellt. Nach dieser Untersuchung fuhr der Rover unterhalb von Burns Cliff wieder zum Einstiegspunkt Karatepe und von dort am 21. Dezember 2004 (Sol 318) wieder heraus.
Die Untersuchungen im Endurance-Krater ergaben, dass die Region nicht nur einmalig von flachem, salzigem Wasser bedeckt war, sondern öfter von Wasser bedeckt und wieder ausgetrocknet war.[8][9] Um diese Ergebnisse zu bestätigen, wurde als neues Fernziel ein Krater namens Victoria in 5,6 km Entfernung ausgesucht.
Erstes Halbjahr 2005 (Sol 333 bis 508) – Zwischenfall an der Düne
Die erste Station nach Endurance war die Untersuchung des eigenen Hitzeschildes, der bei der Landung etwas südlich vom Krater aufgekommen war. Hier tat sich die einmalige Gelegenheit auf, dieses Bauteil nach seinem Einsatz zu untersuchen, unter anderem auch, wie sich das hitzebeständige Material während des Eintritts in die Atmosphäre verändert hatte. Dabei wurde unter anderem festgestellt, dass sich die Innenseite beim Aufprall nach außen gekrempelt hatte. Wenige Meter neben dem Hitzeschild entdeckte Opportunity seinen ersten Eisenmeteoriten namens Heat Shield Rock.
Nach der Untersuchung des Hitzeschildes begann der Rover seinen Weg zum Victoria-Krater. Da die Gegend sehr flach und einförmig war, kam der Rover schnell voran; so wurden teilweise über 400 m am Tag gefahren. Ein erstes Zwischenziel wurde am Sol 399 (8. März 2005) am Krater Vostok erreicht. Der Krater war jedoch vollständig mit Sand aufgefüllt und daher für eine eingehende Untersuchung nicht geeignet. Deshalb wurde weiter in Richtung Süden gefahren, zu einem Gebiet namens Etched Terrain, welches aus großflächigen Strukturen aus Grundgestein besteht. Während der nächsten Fahrten wurden die Dünen, die Opportunity durchquerte, höher. Nachdem am 17. April 2005 der Motor des rechten Vorderrads blockierte, wurde der Rover angewiesen, von nun an rückwärts zu fahren, um dieses Rad zu entlasten.

Am 26. April 2005 nach 5,346 km Fahrtstrecke gruben sich die Räder des Rovers beim Überqueren einer Düne im lockeren Sand fest. Da die Software auf so eine Situation nicht vorbereitet war, drehten sich die Räder bis zum programmierten Ende weiter. Alle sechs Räder steckten nun bis zu den Achsen im Sand. Danach versuchten NASA-Techniker mit Hilfe von Simulationen auf der Erde einen Weg zu finden, den Rover wieder zu befreien. Pessimisten befürchteten ein vorzeitiges Ende der mobilen Mission. Am 13. Mai begann der Versuch, den Rover vorsichtig in kleinen Schritten zurückzufahren. Bis zum 3. Juni 2005 konnte Opportunity bereits um 93 cm aus der Düne herausbewegt werden. Die dazu benötigten Radumdrehungen hätten auf freier Strecke für 177,2 m Strecke ausgereicht. Am 4. Juni gelang es schließlich, den Rover aus der Düne hinauszumanövrieren. Nach dieser fünfwöchigen Panne konnten sich nun alle Räder wieder frei bewegen. Anschließend wurde die auf den Namen Purgatory („Fegefeuer“) getaufte Düne untersucht, um festzustellen, was diese von den zahlreichen, bisher problemlos überquerten Dünen unterscheidet. Seit dem 5. Juli 2005 war Opportunity wieder unterwegs in Richtung des Kraters Erebus.
Zweites Halbjahr 2005 (Sol 509 bis 687) – Erebus-Krater
Nach der Befreiung aus der Sanddüne wurden nun nicht mehr lange Strecken gefahren, deshalb kam der Rover nicht mehr so schnell voran wie bisher. Da die Ausrichtung der Dünen hauptsächlich in Nord-Süd-Richtung lag, konnte die Raumsonde meistens zwischen den Dünen entlangfahren und musste nur ab und zu eine Düne überqueren. Das Etched Terrain genannte Gelände wurde erreicht und es stellte sich heraus, dass hier mehr Grundgestein zwischen den Dünen zum Vorschein kam. Dies war für die Fahrt positiv, da der Rover auf festem Gestein mit weniger Problemen zu kämpfen hatte als wenn er auf sandigem Untergrund fährt. Am 21. August kam es zu einem Computerabsturz. Dieses Problem wurde während der nächsten Sols untersucht, so dass die Fahrt zum Erebus-Krater erst wieder im September aufgenommen werden konnte.
Am 5. Oktober konnte ein Bild des Rovers in den Marsdünen von der Marssonde Mars Global Surveyor aufgenommen werden. Diese Aufnahmen waren wichtige Hilfen zur Navigation. Am 2. November wurde der Krater Erebus erreicht. Er wurde am östlichen Rand umrundet, da dort der Boden felsiger war. Der Krater selbst ist mit Sand gefüllt, an den Rändern sind jedoch kleinere Klippen offen; diese wurden später untersucht.
Am 20. November 2005 sollte der Instrumentenarm planmäßig ausgefahren werden, jedoch blockierte ein Problem mit dem Schultergelenkmotor den Befehl. Eine Ursache hierfür könnte die inzwischen vielfach längere Einsatzzeit des Rovers sein. In den nächsten Wochen wurde das Problem von den Ingenieuren untersucht. Währenddessen blieb der Rover an dieser Position und nahm das Erebus Rim genannte Panorama auf, welches aus über 1300 Einzelbildern besteht.
Erstes Halbjahr 2006 (Sol 588 bis 863) – Aufbruch zum Victoria-Krater

Der Instrumentenarm musste unbedingt wieder eingefahren werden, da die Fahrt mit ausgefahrenem Arm kaum möglich war. Am 20. Januar (Sol 695) fuhr der Rover wieder weiter, nachdem der Instrumentenarm an einer anderen Stelle am Gerät verstaut werden konnte. Opportunity führte zudem koordinierte Untersuchungen der Atmosphäre mit seinem MiniTES-Spektrometer in Kombination mit der Mars Sonde Mars Express der Europäischen Weltraumorganisation durch und fotografierte Durchgänge des Marsmondes Phobos durch die Sonnenscheibe. Dadurch kann z. B. die Bahn des Mondes noch genauer bestimmt werden.
Vom Krater Erebus wurden eine Klippe namens Payson und die Abbruchkante Mogollon Rim, die vom Kraterrand noch sichtbar waren, dann eingehender untersucht. Auch hier zeigten sich wieder geschichtete Felslagen, die als Sedimentgestein interpretiert wurden.
Am 17. März beendete Opportunity die Untersuchung von Erebus und begann nun die Fahrt zum Krater Victoria, der sich in 2 km südöstlicher Entfernung befindet. Die nächsten Wochen kam der Rover wieder zügiger voran, auch weil die Dünen wieder niedriger wurden, und hatte bis zum 27. Juni 2006 insgesamt 8,392 km auf dem Mars zurückgelegt. Trotz aller Vorsicht fuhr sich der Rover am 29. Mai (Sol 833) in einer kleinen Düne fest, konnte jedoch nach einer Woche wieder daraus befreit werden.
Zweites Halbjahr 2006 (Sol 684 bis 1042) – Ankunft am Victoria-Krater
In der ersten Julihälfte wurde die Software des Rovers aktualisiert. Er erhielt dadurch eine größere Autonomie beim Fahren und ein verbessertes Energiemanagement. Anfang August erreichte das Fahrzeug den etwa 35 m durchmessenden Krater Beagle, der nur etwa 500 m vom Rand von Victoria entfernt ist; einen Monat später war das Fahrzeug nur noch 200 m vom Kraterrand entfernt. Während der Fahrt trat auch wieder ein Säuberungsereignis auf, bei dem Staub von den Solarpaneelen heruntergeblasen wurde, was die Stromversorgung stark verbesserte. Gerade durch diese Ereignisse verlängerte sich die Lebensdauer des Roboters immer wieder.
Der Rover erreichte am 28./29. September 2006 nach mehreren kurzen Fahrten an den drei vorangegangenen Sols (30,2 m, 26,4 m und 3,5 m)[10] den Rand des ca. 60 m tiefen und 800 m breiten Kraters an einer Einbuchtung, die Duck Bay genannt wurde. Die Untersuchung der Gesteinsschichten des Kraters sollte noch detailliertere Erkenntnisse über die Existenz von Wasser auf dem roten Planeten ermöglichen. Bei ersten Aufnahmen des Kraterinneren wurden die erhofften Gesteinsschichten entdeckt, die sich in bis zu 6 m hohen Klippen auftürmten. Nun galt es, den besten Einstieg in den Krater zu finden. Deshalb fuhr der Rover zuerst nach Norden, um den Krater in den nächsten Monaten im Uhrzeigersinn teilweise zu umrunden. Dabei wurden jeweils Bilder aus ca. 10 m entfernten Standorten zu Stereobildern kombiniert, um eine dreidimensionale Karte des Kraters zu erstellen.
Der Mars Reconnaissance Orbiter (MRO) kam im März 2006 am Mars an und nahm Ende November dann den wissenschaftlichen Betrieb auf. Da die Kameraauflösung dieses Orbiters die bisherige Qualität der Vorgängermissionen bei weitem übertraf, konnte die Umgebung von Opportunity sehr detailreich aufgenommen werden. Anfang Oktober 2006 veröffentlichte die NASA Aufnahmen des Mars Reconnaissance Orbiters, auf dem der Krater und der Rover selbst zu sehen sind.
Erstes Halbjahr 2007 (Sol 1043 bis 1219) – Kraterumrundung
Im Januar 2007 war Opportunity am nördlichen Rand des Kraters weitergefahren und fotografierte die Klippen aus unterschiedlichen Perspektiven. Bei diesen ergab sich, dass diese aus Sanddünen gebildet wurden, die durch nord-südliche Winde aufgehäuft wurden und dann versteinerten.[11] Ein weiterer Meteorit namens Santa Catarina wurde hier am nördlichen Kraterrand aufgefunden und untersucht. Am 9. Februar wurde die 10-km-Marke überschritten.
Das APXS wurde nun erstmals dazu benutzt, den Gehalt des Edelgases Argon in der Marsatmosphäre zu bestimmen. Dazu wurde das Instrument in Richtung Himmel gerichtet und dann etwa drei Stunden lang Messungen getätigt. Diese Untersuchungen wurden ebenfalls vom Zwillingsrover Spirit auf der anderen Seite des Mars durchgeführt. Dadurch erhoffte man sich ein besseres Verständnis, wie sich das Mischungsverhältnis von Argon zu Kohlendioxid im Laufe der Jahreszeiten verändert, wenn sich das Kohlendioxid an den Polen niederschlägt.
Im März wurde das Valley without peril erreicht, welches als ein möglicher Einstiegspunkt in den Krater angesehen wurde. Hier stellte sich heraus, dass der Abhang eine zu starke Neigung hatte, um an dieser Stelle gefahrlos hineinzufahren. Nachdem noch zwei weitere Klippenvorsprünge untersucht wurden, wurde entschieden, den ganzen Weg 600 m zurück zum ursprünglichen Ankunftsort zu fahren, um dort in den Krater hinabzufahren. Bei der Rückfahrt wurden die Solarzellen durch einige Windböen gereinigt. So stieg die zur Verfügung stehende Energie auf fast 800 Wh (Wattstunden) pro Sol an. Dies war beinahe so viel wie nach der Landung dreieinhalb Jahre zuvor. Am 15. Juni erreichte Opportunity wieder Duck Bay und bereitete sich auf den Einstieg in den Krater vor.
Am 4. Januar 2007 bekamen beide Rover neue Steuerungssoftware für ihre Computer. Das neue System gab dem Rover mehr Entscheidungsfreiheit, ob ein Bild übertragen werden soll oder ob der Instrumentenarm ausgefahren werden soll. Dies sparte den Wissenschaftlern Zeit, da diese nicht mehr hunderte von Bildern bewerten mussten.[12]
Zweites Halbjahr 2007 (Sol 1219 bis 1398) – Der Staubsturm

Der geplante Einstieg musste verschoben werden, denn ab Ende Juli 2007 behinderte ein Staubsturm die Sonde, der bald große Teile des Mars umfasste. Der aufgewirbelte Staub verdunkelte den Himmel fast komplett, sodass die Solarpaneele die Batterien nicht mehr aufladen konnten. Um Strom zu sparen, wurden alle Aktivitäten eingestellt. Die Sonde sollte bei möglichst geringem Stromverbrauch das Ende des Sturmes abwarten. Dieses Abwarten erwies sich jedoch als sehr schwierig, da die Sonde (auch aufgrund ihrer kurzen Lebenserwartung) nicht für solche Situationen konstruiert worden war. Die Sonde erzeugt im Stromsparmodus zu wenig Wärme, als dass sie die Elektronik betriebswarm halten könnte. Sinkt die Temperatur der Elektronik unter einen bestimmten Wert, so springen automatische Heizungen an, um Kälteschäden an den Elektronik-Bauteilen (unter −37 °C) zu vermeiden. Diese verbrauchten jedoch mehr Strom als die Sonde während des Sturms (bei bis zu −80 °C) noch produzieren konnte. Die Heizungen würden daher die Batterien sehr schnell leeren, was zu einer endgültigen Abschaltung der Sonde führen würde. Seit Ende Juli wurde der Rover daher wieder etwas länger aktiv gehalten, um ein Anspringen der Heizungen zu verhindern.
Die Sonde schaltet sich bei kritischem Ladestand der Batterien selbst ab und prüfte nur noch jeden Sol einmal, ob wieder genug Energie für eine erneute Einschaltung zur Verfügung stehen würde. Auch zu große Staubablagerungen auf den Paneelen wurden befürchtet, somit hätte die Sonde nicht mehr genug Energie gewinnen können, sich wieder vollständig einzuschalten.[13]
Mitte August wurde der Sturm schwächer und die Durchsichtigkeit der Atmosphäre erhöhte sich wieder. Opportunity hatte den sechswöchigen Staubsturm überstanden. Das nächste Problem war nun, dass sich der vom Sturm aufgewirbelte Staub auf die Solarzellen ablagerte.
Am 11. September konnte Opportunity dann in den Krater hineinfahren. Hier untersuchte man zuerst eine hellere Gesteinsschicht (bright band), die bei der Kraterumfahrung entdeckt wurde. Diese Schicht ist überall am Kraterrand sichtbar. Die Untersuchungen ergaben, dass diese hellere Gesteinsschicht durch Diagenese gebildet wurde. Diese Gesteinslage trennt das Grundgestein von dem Material, das durch den Einschlag ausgeworfen wurde.[14]
Erstes Halbjahr 2008 (Sol 1399 bis 1575) – Victoria-Krater

Opportunity untersuchte die nächsten Wochen diese geologisch interessante Gesteinsschicht und arbeitete sich tiefer in das Kraterinnere hinein. Unter anderem wurde an einer Lage namens Gilbert ein schmaler, hervorstehender Gesteinsgrat entdeckt. Dieser Grat besteht aus Mineralien, die ursprünglich in Felsspalten abgelagert wurden und dann übrig blieben, nachdem das umgebende Gestein wegerodiert wurde. Analysen mit dem APXS und dem Mößbauer-Spektrometer ergaben, dass der Grat ebenso wie die Blueberries aus Hämatit besteht.
Ende April waren dann die Messungen abgeschlossen, und nun sollte die Klippe Cape Verde genauer erforscht werden. Die Fahrt dorthin stellte sich als problematisch heraus: Der Rover rutschte auf dem sandigen und 25° steilen Gesteinsboden sehr stark und Mitte Mai grub sich das mittlere rechte Rad auch noch in dem sandigen Boden ein. Zudem traten im April wieder Probleme mit dem Instrumentenarm auf. Dieser konnte wegen des Schultergelenkmotors nicht ausgeklappt werden. Erst nach etlichen Versuchen konnte man ihn wieder bewegen. Die weiteren Strecken mussten jedoch sorgfältig geplant werden, da die Fahrt mit einem ausgefahrenen Instrumentenarm schwierig wurde.
Am Sol 1565, dem 19. Juni 2008, hatte sich Opportunity bis auf 10 m dem unteren Bereich von Cape Verde genähert. Aus dieser Position heraus, Cape St. Mary genannt, wurde dann eine detailreiche Panoramaaufnahme der Klippen erstellt.[15] In der Nähe der Klippe musste auch noch auf den Schattenwurf der Klippen geachtet werden, um die Stromversorgung nicht zu gefährden. Die Klippen selbst konnten nicht erreicht werden, da der Boden davor zu steil und sandig war.
Zweites Halbjahr 2008 (Sol 1576 bis 1754) – Abschied vom Victoria-Krater

Im Juli wurde dann versucht, einige geologisch interessante Felsen in der Nähe von Cape Verde zu erreichen. Das Gelände erwies sich jedoch als zu schwierig zu befahren. Am 24. Juli (Sol 1600) wurde am Motor des rechten Vorderrads ein ungewöhnlich hoher Strom gemessen. Beim Rover Spirit fiel ein Rad nach einer ähnlichen Stromspitze aus und konnte nicht mehr reaktiviert werden. Da Opportunity mit einem defekten Rad den Krater nie wieder verlassen könnte, wurde entschieden, die Untersuchung des Kraters abzubrechen und auf dem schnellsten Wege aus dem Krater herauszufahren. Am 24. August 2008 fuhr der Rover wieder an der Stelle Duck Bay aus dem Krater heraus.
Nachdem Opportunity wieder ebenen Boden erreicht hatte, wurde Anfang September getestet, wie mit dem defekten Instrumentenarm gefahren und gearbeitet werden kann. Im Anschluss an die Tests fuhr der Rover am südlichen Rand des Victoria-Kraters weiter, um Aufnahmen der hier gelegenen Klippen zu machen. In der flachen Umgebung konnten pro Tag Strecken über 200 m gefahren werden.
Ende Oktober begann dann die Reise zum Krater Endeavour. Dieser Krater ist ca. 12 km entfernt und hat einen Durchmesser von 22 km und eine Tiefe von 300 m. Auch hier versprach man sich wieder Zugriff auf tiefere Gesteinslagen und dadurch Einblick in die frühere Geschichte des Mars. Da sich aber auf direktem Weg zu hohe Dünenfelder befanden, musste der Rover einen Umweg von etwa 19 km machen. Deshalb fuhr der Rover zuerst in südwestlicher Richtung. Durch die hochauflösenden Aufnahmen der Mars Reconnaissance Orbiters, auf denen selbst einzelne Felsen und die Dünenkämme zu sehen sind, konnte die Route sehr gut im Voraus geplant werden.
Am 29. November begann die solare Konjunktion und damit wieder eine Phase, in der mit keiner Sonde auf dem Mars kommuniziert werden konnte. Während dieser Zeit nahm Opportunity ein Panorama auf und analysierte den Stein Santorini mit dem Mößbauer-Spektrometer. Santorini erwies sich als ein Mesosiderite-Meteorit.
Erstes Halbjahr 2009 (Sol 1755 bis 1930) – Fahrt in der Meridiani-Ebene
Nach der solaren Konjunktion fuhr der Rover weiter in südwestlicher Richtung. Dank der autonomen Steuerung konnten immer wieder Strecken bis zu 150 m pro Tag gefahren werden. Doch das Alter des Rovers und seiner Bauteile machte sich bemerkbar: Nachdem einige Strecken auf sandigem Boden zurückgelegt wurden, traten wieder erhöhte Ströme im Vorderrad-Motor auf. Deshalb wurden einige Strecken rückwärtsfahrend bewältigt. Das besserte das Verhalten des Motors, jedoch kam der Rover in diesem Modus langsamer voran. Zudem wurden immer wieder Ruhepausen eingelegt, damit sich das Rad erholen konnte. Während der Pausen verteilt sich das Schmiermittel im Radlager. Dies bewirkt bei den nächsten Fahrten dann weniger Widerstand und auch weniger Stromverbrauch. Opportunity kam an einigen kleineren Kratern vorbei, die ein geschätztes Alter von nur 10.000 bis 100.000 Jahren haben. Am Sol 1884 (12. Mai 2009) entdeckte die Sonde ihren fünften Meteoriten: Kasos.
Eine ungewöhnliche Hilfestellung gab Opportunity seinem Geschwisterrover am 19. Mai 2009. Spirit hatte sich auf der anderen Seite des Mars in sandigem Boden eingegraben. Um die Situation besser abschätzen zu können, war es notwendig, ein möglichst genaues Bild der Lage zu bekommen. Die einzige Kamera, die unter den Rover schauen kann, war die Mikroskopkamera am Instrumentenarm. Diese war jedoch nur für Nahaufnahmen vorgesehen, das aufgenommene Bild konnte jedoch aufgrund der bekannten Optik nachträglich scharfgerechnet werden. Opportunity nahm hierfür einige Bilder von seinem Unterboden auf, um zu sehen, ob diese Technik die gewünschten Ergebnisse liefert.
Bis zum 29. Juni war die gefahrene Wegstrecke auf 16,712 km angewachsen. Während bisher in südlicher Richtung gefahren wurde, bewegte sich Opportunity nun einige hundert Meter in östlicher Richtung, um ein Feld mit hohen Dünen zu umgehen.
Zweites Halbjahr 2009 (Sol 1931 bis 2109) – Meteoritenfunde
Am 19. Juli entdeckte man auf älteren Aufnahmen einen größeren Stein, an dem Opportunity zuvor in einiger Entfernung vorbeigefahren war. Da der Stein ungewöhnlich groß erschien, wurde beschlossen, den Rover die gerade gefahrene Strecke von ca. 200 m wieder zurückfahren zu lassen, um diesen Stein zu untersuchen. Innerhalb einiger Tage wurde der 70 cm große Felsbrocken namens Block Island erreicht. Er stellte sich, wie zuvor Heat Shield Rock, als weiterer Eisenmeteorit heraus. Besonders fielen bei diesem Meteorit die ungewöhnlichen Vertiefungen auf, die durch Verwitterungsprozesse entstanden sein müssen. Um ein möglichst genaues dreidimensionales Modell des Objekts zu ermitteln, umkreiste der Rover den Meteorit und machte Aufnahmen aus insgesamt sechs verschiedenen Positionen. Bereits kurz nachdem Block Island verlassen wurde, kam in der Ebene Ende September der nächste Meteorit, Shelter Island, in Sicht. Auch dieser wurde genauer untersucht. Am 15. Oktober wurde der dritte Meteorit, Mackinac, entdeckt. Anscheinend sind diese Meteoriten Bruchstücke eines größeren Meteoriten, der in dieser Gegend heruntergekommen war.

Opportunity fuhr nun auf festem Felsgestein in größeren Etappen in Richtung Süden, um einen bereits aus dem Marsorbit zu erkennenden neueren Krater anzupeilen. Auf dem Weg dorthin stieß der Rover Anfang November auf den nächsten größeren Felsbrocken, Marquette Island, bei dem die Herkunft anfangs unklar war. Mit dem Steinschleifwerkzeug, welches durch den jahrelangen Einsatz nahezu stumpf geworden war, konnte zumindest die oberste Schicht abgeschliffen und der Stein an dieser Stelle mit den restlichen Instrumenten untersucht werden. Zudem war der Stein selbst schon an einer Kante auseinandergebrochen, was den Zugriff auf sein Innerstes erleichterte. Es stellte sich heraus, dass Marquette Island ein basaltisches Gestein aus dem Inneren des Mars sein musste, das eines Tages bei einem Kratereinschlag aus der Tiefe herausgeschleudert wurde.
Erstes Halbjahr 2010 (Sol 2110 bis 2285) – Einschlagkrater Concepción
Am Sol 2122, dem 12. Januar 2010, beendete Opportunity seine Analysen an Marquette Island und setzte seine Reise fort. Das nächste Ziel war bereits auf Aufnahmen von MRO sichtbar: Ein anscheinend frischer Einschlagkrater namens Concepción, umgeben von dunklen Auswurfstrahlen. Die Forscher schätzten sein Alter in der Größenordnung von 1000 Jahren ein. Damit war Concepción der jüngste jemals untersuchte Krater. Der Rover umrundete den Krater und nahm ihn in unterschiedlichen Perspektiven auf. Ein Stein namens Chocolate Hills wurde genauer untersucht, da auf seiner Oberfläche eine dunkle Kruste entdeckt wurde. Diese könnte durch Aufschmelzprozesse beim Einschlag entstanden sein. Am 9. März (Sol 2177) wurde die Untersuchung von Concepción abgeschlossen und die Fahrt in südlicher Richtung weitergeführt. Im März 2010 wurde ein weiteres Softwareupdate in Betrieb genommen, welches dem Rover noch mehr Autonomie verlieh: Nach einer abgeschlossenen Fahrt suchte das System namens „AEGIS“ (Autonomous Exploration for Gathering Increased Science) nach auffallenden Objekten und fotografierte diese automatisch.
Die Fahrt ging weiter in südlicher Richtung an einem Doppelkrater vorbei. Dabei machte sich der Marswinter bemerkbar. Durch die energieintensiven Fahrten müssen die Batterien aufgeladen werden, deshalb pausierte der Rover ein oder zwei Sols zwischen einzelnen Fahrten. Um möglichst viel Sonnenenergie abzubekommen, wurde der Rover schräg an den Dünenhängen geparkt. Um zu verhindern, dass bei dem kalten Wetter die energiebedürftigen Heizelemente anspringen, wurde der Rover länger wach gehalten.
Im Mai wurde mit dem Trägheitsmessgerät versucht, ein Marsbeben zu entdecken, was jedoch nicht gelang.
Am 19. Mai hatte Opportunity den Rekord für die am längsten auf einem Planeten operierende Raumsonde gebrochen, den Viking 1 mit einer Dauer von 6 Jahren und 116 Tagen aufgestellt hatte.[16]
Zweites Halbjahr 2010 (Sol 2286 bis 2464) – Zwischenstation Krater Santa Maria

Durch die immer länger dauernde Sonnenscheindauer und durch Windreinigungsereignisse der Solarpaneele stand für die Fahrten von Opportunity wieder mehr Energie zur Verfügung. Am 28. Juli konnte der Rover zum ersten Mal ein Foto eines Staubteufels aufnehmen, wie er gelegentlich für die Reinigung der Solarzellen sorgt. Dies gelang bisher nur Spirit im Gusev-Krater auf der anderen Seite des Mars.[17]
Auf dem Weg zum Endeavour-Krater wurde die automatische Navigation des Rovers, unterstützt von den Gefahrenausweichkameras (Hazcam), getestet, welche es dem Rover erlaubt, autonom zu fahren. Hierbei fährt der Rover rückwärts, da das Sichtfeld der vorwärts blickenden Hazcam durch eine ungünstig angebrachte Antenne teilweise versperrt wird. Am 16. Dezember (Sol 2450) erreichte der Rover den 80 m großen Krater Santa Maria und untersuchte ihn in den nächsten Wochen genauer.
Erstes Halbjahr 2011 (Sol 2465 bis 2640) – Kurs auf Cape York
Anfang des Jahres umfuhr der Rover den Krater zur Hälfte und positionierte sich an einer Stelle am Kraterrand. An diesem Ort wurden auf Aufnahmen von der MRO-Sonde hydratisierte Sulfatminerale entdeckt. Dieses bildet sich nur in Verbindung mit Wasser. Zu dieser Zeit begann wieder die solare Konjunktion. Diese Zeit wurde genutzt, dieses Gestein mit dem Mößbauer-Spektrometer zu untersuchen.
Bis zum 24. März wurden die Untersuchungen am Krater Santa Maria abgeschlossen, und der Rover nahm seine Reise zum Endeavour-Krater wieder auf. Die Entfernung zwischen Cape York und Santa Maria beträgt etwa 6,5 km.
Zweites Halbjahr 2011 (Sol 2641 bis 2819) – Endeavour-Krater und Cape York


Bis zum 5. Juli hatte der Rover 18,0 km bzw. 90 % des Weges zum Endeavour-Krater geschafft. Zu diesem Zeitpunkt summierte sich die gefahrene Gesamtstrecke in der Meridiani-Ebene auf 31 km. Es wurden auf der Fahrt weitere (mögliche) Meteoriten fotografiert, die jedoch nicht weiter analysiert wurden. Obwohl Opportunity nur noch 1,8 km von Cape York entfernt war, kam dieses Objekt noch nicht in Sicht. Grund war, dass Cape York sich auf einem Abhang am Kraterrand des Endeavour-Kraters befand und dadurch dem Rover verborgen blieb. Als Ankunftspunkt an Cape York wurde der kleine Krater Spirit Point (benannt nach dem Zwillingsrover Spirit) im Süden dieser Struktur bekanntgegeben.
Nachdem Opportunity am 28. August 2008 (Sol 1634) den Victoria-Krater verlassen hatte, konnte der Rover in über 1000 Sols mehr als 21 km zurücklegen und am 9. August 2011 (Sol 2681), knapp drei Erdjahre später, den Endeavour-Krater erreichen. Zusammen mit der vor dem 28. August 2008 bereits zurückgelegten Strecke waren es am 9. August 2011 33,49 km. In dem einen Erdjahr danach bewegte er sich etwas mehr als 1 km entlang des Kraterrandes weiter. Die geringe Fahrleistung ist vor allem durch den Marswinter zu erklären, der etwa die Hälfte der 12 Erdmonate (Dezember 2011 bis Juni 2012) andauerte.
Der Endeavour-Krater hat einen Durchmesser von 22 km – etwa so groß wie das Nördlinger Ries – und bot den Forschern neue Möglichkeiten, ältere Gesteinsschichten zu untersuchen. Insbesondere wurde Ausschau gehalten nach Schichtsilikaten, die sich nur in Verbindung mit Wasser bilden können. Ins Innere des Kraters sollte nicht eingefahren werden, da dort die gleichen Gesteinsschichten erwartet wurden, die bisher in der Meridiani-Ebene untersucht worden waren.[18]
Ein Fels namens Tisdale wurde durch einen späteren Einschlag aus dem Rand des Endeavour-Kraters herausgeschleudert. Er lag am südlichen Rand des Odyssey Kraters. Bei ihm wurde eine hohe Konzentration des Elements Zink festgestellt. Dies deutete darauf hin, dass er durch hydrothermale Vorgänge verändert wurde. Nach dem Einschlag, der den Endeavour-Krater entstehen ließ, wurde Wärme frei, die im Untergrund vorhandenes Wassereis aufschmolz. Dieses Wasser verteilte die gelösten Mineralstoffe in das umgebende Gestein.
Bei der Untersuchung der Gegend um Cape York wurden auffällig hellere Gesteinsadern entdeckt. Bei der näheren Untersuchung solch einer Ader namens Homestake mit dem Röntgenspektrometer stellte sich heraus, dass diese aus reinem Kalziumsulfat (Gips) besteht. Eine Erklärung hierfür ist, dass früher Wasser durch den Untergrund geflossen ist. Das gelöste Kalziumsulfat setzte sich dann in den Hohlräumen ab.[19] Diese beiden Entdeckungen sind weitere Hinweise darauf, dass flüssiges Wasser zumindest zeitweise auf dem Mars verfügbar war, um eine lebensfreundliche Umwelt zu bieten.
Da die Energieversorgung der Rovers durch abgelagerten Staub kritischer geworden war als in den Jahren zuvor, suchte man eine Überwinterungsstelle, an der der Rover zur Sonne geneigt den Winter besser überstehen konnte. Diese Stelle wurde im Norden von Cape York gefunden und bis zum Dezember 2011 angefahren.[20]
Erstes Halbjahr 2012 (Sol 2829 bis 2997) – Greeley Haven


Der Ort, an dem Opportunity überwintern sollte, wurde nach einem verstorbenen NASA-Wissenschaftler Greeley Haven benannt. An dieser Stelle befindet sich ein Gesteinsaufschluss, der mit dem Instrumentenarm genauer untersucht wurde. Da der Rover über die Wintermonate nicht bewegt wurde, wurde während dieser Zeit ein Experiment mit Radiowellen durchgeführt: Hierbei wurde versucht, durch Funksignale des Rovers kleinste Kippbewegungen der Rotationsachse des Mars zu entdecken. Damit können Erkenntnisse über den inneren Aufbau des Planetenkerns gewonnen werden. Nach längerer Winterpause bewegte sich Opportunity am 9. Mai 2012 die ersten 3,7 m aus seinem Winterquartier weg, um die Untersuchung von Cape York fortzusetzen.[21] Zuerst wurden Aufnahmen der Überwinterungsposition gemacht, um die während der Winterzeit durchgeführten Messungen im Kontext beurteilen zu können.[22] Die Fahrt wurde von Cape York aus in nördliche Richtung fortgesetzt, um dort weitere Untersuchungen des Bodens und weiterer Gipsadern durchzuführen.
Zweites Halbjahr 2012 (Sol 2998 bis 3176) – Weitere Untersuchung des Cape York
Am 2. Juli 2012 konnte Opportunity bereits seinen 3000. Marstag (entsprechend 3078 Tage auf der Erde) begehen.[23] Die NASA veröffentlichte am 5. Juli[23] ein neues Panorama von Cape York und dem Endeavour-Krater, welches der Rover während seiner Winterpause in hoher Auflösung aufgenommen hatte. Das Panoramabild besteht aus über 800 Einzelbildern, die zwischen dem 21. Dezember 2011 und dem 8. Mai 2012 aufgenommen wurden.
Die Energieproduktion des Rovers stieg ab Sol 2989 (20. Juni 2012), bedingt durch bessere Sonneneinstrahlung, klaren Himmel und durch Wind gereinigten Solarzellen wieder von unter 400 auf über 500 Wh pro Sol an.[24]
Einige Tage vor der Ankunft von Curiosity wurde Opportunity für 9 Tage programmiert und dann „geparkt“, um während der Ankunft von Curiosity den Orbiter und das Funknetz frei zu halten.[25] Der Stand der Kilometerzählung war am 7. August 2012 (Sol 3035): 34,64 km.
Am 12. August (Sol 3040) wurde die Fahrt fortgesetzt und der kleine Krater Sao Rafael im Vorbeifahren mit der Panoramakamera aufgenommen.[26]
Seit Ende August hatte sich Opportunity nicht sehr weit bewegt. Die 35-Kilometer-Marke wurde bereits am 28. August überschritten,[27] die 22-Meilen-Marke erst Anfang November.[28] Nach einer der mit 23 cm (9 Zoll) kürzesten Bewegungen wird der Stand der Kilometerzählung am 4. Dezember 2012 mit 35,43 km (22,02 mi) angegeben.[29]
Erstes Halbjahr 2013 (Sol 3177 bis 3352) – Ende der Untersuchung des Cape York
Auch wenn sich der genaue Standort geändert hatte (Opportunity befand sich Anfang Januar am Copper Cliff und Ende Januar bei Fullerton 1), bewegte sich der Rover nur sehr wenig (50 m in 2 Monaten). Für die Feiertage am Jahreswechsel waren Untersuchungsarbeiten am Ort programmiert worden. Neben der Fortsetzung der Bodenuntersuchungen der Vorweihnachtszeit wurde die Atmosphäre (Dichte und Argon) untersucht.[30] Der Tag vor dem Perihel des Mars war der Sol 3200. Opportunity hatte damit das 35,5-fache seiner Primärmissionszeit erreicht und etwa ein Kilometer pro 90 Sols zurückgelegt.[31] In der Zeit vom 7. Januar bis 27. Februar hatten sich keine „Demenz“-Probleme mit dem Flash-File-System gezeigt.[32]
Am 28. Februar wurde durch Fehler im Flash-File-System ein unerwarteter Reset ausgelöst. Opportunity war danach 2 Tage im sogenannten „Automode“, das war ein sicherer Zustand mit täglichem Aufwachen, bei dem der Rover nur seinen eigenen Zustand (insbesondere die Eigentemperatur) überwachte. Am 2. März wurde durch ein gezieltes Sofortkommando der Kommandospeicher gelöscht und neue Kommandos aufgespielt. Danach funktionierte der Rover eine Woche lang wieder einwandfrei. Falls die Probleme zunehmen würden, sollte eine Reformatierung des Flash-File-Systems erfolgen, um eine vollständige Wiederherstellung zu erreichen. Am 9. März gab es wieder kleinere Probleme mit dem Flash-File-System, aber nicht die gleichen wie zuvor. Daher sollte das System zunächst weiter beobachtet werden.[33]
Am 11. März beendete der Rover seinen lokalen „Spaziergang“ und betrachtete nochmals die Newberries bei Kirkwood. Nach 10 Tagen am Ort setzte sich der Rover am 21. März wieder in Bewegung und positionierte sich bei Big Nickel. Diesen Platz beobachtete er etwa 3 Wochen lang, weil wegen der Konjunktion am 18. April[34][35] keine Kommunikation mit den Marsrovern und -orbitern zwischen dem 9. und 26. April möglich war. Aus diesem Grund waren vom 9. bis 26. April keine Fahrten, sondern nur Bewegungen des Armes und Analysen der unmittelbaren Umgebung geplant.[36] Als am 27. April wieder Kontakt aufgenommen wurde, stellte sich heraus, dass sich Opportunity am 21. April wegen eines Speicherfehlers in einen Standby-Modus begeben hatte. Am 1. Mai konnte der Rover wieder in den normalen Betriebszustand versetzt werden.[37] Am 16. Mai 2013 hatte Opportunity insgesamt 35,76 km zurückgelegt und damit mehr als das Mondauto von Apollo 17.[38] Der Rover mit der größten zurückgelegten Strecke war zu diesem Zeitpunkt aber noch Lunochod 2 mit 39 km.[39][40]
Im Juni wurden die Untersuchungen der Gesteine des Cape York beendet und Kurs genommen auf ein neues Ziel: Solander Point. Dies sind Hügel südlich des Capes, die nach einer Fahrtstrecke von 2,2 km erreicht werden sollten. Dort gibt es nach Norden ausgerichtete Hänge, auf denen Opportunity den nahenden Marswinter überstehen würde.[41][42]
Zweites Halbjahr 2013 (Sol 3353 bis 3531) – Solander Point
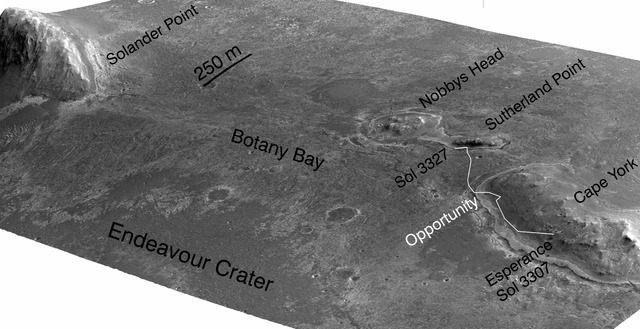
Diese Ansicht wurde mit Hilfe von Stereo-Aufnahmen aus dem Marsorbit erstellt.
Am 10. Juli betrug die Energieproduktion immerhin 435 Wh. Es hatte sich weiterhin Staub auf den Paneelen abgelagert, sodass nur 60 % des einfallenden Lichts zur Stromerzeugung verwertet werden konnte.
Bei der Fahrt kam der Rover so gut voran, dass beschlossen wurde, einen kleinen Umweg ins Kraterinnere zu wagen. Nach diesem Abstecher wurde der Fuß des Solander Point genannten Hügels um den 8. August erreicht. Für den Aufstieg auf den Hügel wurde eine Route so gewählt, dass der Neigungswinkel der Solarpaneele optimal war. Die Hänge des Solander Point geben Einblick in die Zeit der Noachischen Periode.[43] Gesteine dieser frühen Marsgeschichtsperiode liegen normalerweise unter der Oberfläche des Meridiani Planum verborgen. Erst durch den Einschlag, bei dem der Krater entstand, wurden diese Schichten nach oben gehoben. Solander Point erhebt sich ca. 55 m über dem Meridiani Planum.[44] Am 1. Oktober wurde auch versucht, den Kometen ISON zu fotografieren. Dies misslang, da er nicht hell genug für die Panorama-Kamera des Rovers war.
Am 6. Dezember schaltete die Sonde nach Übertragungsproblemen in den Sicherheitsmodus. Die Solarenergieproduktion betrug zu diesem Zeitpunkt nur noch 268 Wh pro Tag. Es ereigneten sich in den darauffolgenden 3 Tagen weitere Übertragungsprobleme. Eine Funktionsüberprüfung zeigte allerdings keine technischen Probleme am System. Am 10. Dezember beendete Opportunity den Sicherheitsmodus wieder. Der Kilometerstand betrug mittlerweile 38,7 km.
Erstes Halbjahr 2014 (Sol 3532 bis 3707) – Murray Ridge

Anfang 2014 hatte der Rover eine Schrägstellung eingehalten, die die von Norden scheinende Sonne am besten einfing. Der Mars erreichte am 3. Januar 2014 seinen Aphel,[45] den am weitesten entfernten Punkt seiner Umlaufbahn. Am 1. Januar geschah wieder ein Säuberungsereignis der Solarpaneele, durch die die Energieproduktion um 35 Wh auf 371 Wh pro Sol anstieg. Der Rover war an einem Gesteinsaufschluss positioniert, bei dem Beobachtungen von Marssonden kleine Mengen an Tonmineralen nahelegen.[46] Ein Gesteinsbruchstück, genannt Pinnacle Island, welches auf vorigen Aufnahmen nicht vorhanden war, erschien in den Bildern vom 7. Januar erstmals. Wie sich herausstellte, wurde der Stein vom Rover überfahren, woraufhin er an die Position sprang, in der er aufgefunden wurde. Am 25. Januar war der 10. Jahrestag der Landung, was von der NASA entsprechend gefeiert wurde. Die Mission war ursprünglich nur für 3 Monate vorgesehen, konnte jedoch immer wieder verlängert werden.
Mit dem Ziel Solander Point und Cape Tribulation fuhr Opportunity am 14. Februar weiter: Auch bei diesen Orten wurde vom Orbit heraus lehmhaltiges Gestein entdeckt, welches auf ehemalige pH-neutrale Wasservorkommen hindeutet. Opportunity sollte dort hinauffahren und die Gesteine kategorisieren.
Während des Aufstiegs entlang der Murray Ridge wurde eine Gegend namens Cook Haven genauer untersucht. Mitte April wurden zudem Panoramaaufnahmen gemacht, da hier die Sicht in den Endeavour-Krater hervorragend war. An Sol 3655 (6. Mai 2014) begann Opportunity mit dem ersten einer ganzen Reihe von Schritten, um die Drift der internen Uhr zu korrigieren. Diese Uhr, von der einige wichtige zeitgesteuerte Aktionen des Rovers abhängen, geht leicht falsch. Aufgrund der langen Laufzeit der Mission hat die Uhr inzwischen einen so großen Unterschied zur realen Zeit angesammelt, dass einige Subsysteme davon betroffen sind. Um dies zu korrigieren, wurden im Laufe eines Jahres einige Korrekturen im Sekundenbereich durchgeführt, um die Abweichung schlussendlich zu beheben. Gegen Ende des Marswinters verbesserte sich die Energieproduktion zusehends und stieg auf 661 Wh am 1. April, auch durch die Unterstützung mehrerer Säuberungsereignisse.
Opportunity erreichte den Punkt Pillinger Point im Mai und untersuchte diese Gegend mit lehmhaltigem Gestein am Rande des Kraters genauer. Anfang Juni 2014 traten Schreibfehler im Flash-Speicher des Rovers auf, mit der Folge, dass sich der Bordcomputer neu startete.
Zweites Halbjahr 2014 (Sol 3708 bis 3886) – Aufstieg zum Cape Tribulation und weitere Speicherfehler

Im Juli 2014 überschritt Opportunity den von Lunochod 2 aufgestellten Rekord von 39 km gefahrener Strecke auf einem fremden Himmelskörper.[4][47] Opportunity fuhr nach Süden entlang des Grates des Solander Points. Anfang Juli 2014 stieg die Stromerzeugung bis auf 745 Wh pro Sol. Durch die gute Energiesituation konnte wieder der Marsmond Phobos in der Nacht beobachtet werden. Zudem wurden mit dem APXS Messungen des Argon-Gehalts der Marsatmosphäre gemacht.
Am 7. August wurde Wdowiak Ridge, eine herausstehende Felsformation mit einem angrenzenden Krater (Ulysses), erreicht. Hier bot sich eine sehr gute Aussicht über den Endeavour-Krater und die umliegende Meridiani-Ebene. Jedoch traten weitere Speicherfehler auf, die einen Neustart des Sondenrechners verursachten. Diese Fehler verzögerten die Arbeiten, da jeweils einige Tage vergehen, bis der Fehler identifiziert und behoben war. Um diese Probleme zu beseitigen, wurde der Flash-Speicher neu formatiert, wobei die defekten Speicherbereiche ausgemappt werden. 5 Jahre zuvor konnten Probleme beim Rover Spirit damit behoben werden, bei Opportunity wurde dies erstmals durchgeführt. Dessen Speichereinheiten waren inzwischen 10 Jahre ununterbrochen im Einsatz und der kosmischen Strahlung ausgesetzt. Im September traten trotzdem weitere Fehler mit dem Flash-Speicher auf: Auf den Speicher konnte nach dem morgendlichen Start nicht zugegriffen werden.

Am 19. Oktober flog der Komet Siding Spring C/2013 A1 sehr nah (139.000 km) am Mars vorbei. Opportunity war dabei Teil einer Kampagne der ganzen Mars-Raumsonden-Armada, die Aufnahmen und Messungen des Kometen machen sollten. Hierbei gelangen dem Rover tatsächliche einige (verwaschene) Aufnahmen des Kometen.
Am 4. November wurden die Messungen bei der Wdowiak Ridge abgeschlossen. Bis zum 17. Dezember fuhr der Rover insgesamt 41,42 km weit. Das nächste Ziel war eine Marathon Valley (nach der Distanz beim Marathonlauf) genannte Vertiefung, ebenfalls eine mögliche Fundstelle von lehmhaltigen Mineralien.[48]
Aufgrund der bestehenden Probleme wurde im Dezember 2014 der Flash-Speicher wieder neu formatiert, jedoch ohne Erfolg. Deshalb entschied man sich, den Rover ohne Flash zu betreiben. Dies war möglich, jedoch mussten alle Ergebnisse eines Tages vor dessen „Schlafenlegen“ zurückgesendet werden, denn diese gingen sonst im Schlafzustand des Rechners verloren.
Erstes Halbjahr 2015 (Sol 3887 bis 4062) – Spirit-of-St.-Louis-Krater


Der Krater ist nur durch die dunklere Oberfläche erkennbar und hat einen zerfallenen Zentralberg (Lindberg Mound)
Am 5. Januar erreichte Opportunity den Gipfel des Cape Tribulation, den bisher höchsten Punkt seiner mittlerweile 11-jährigen Reise. Dieser Punkt liegt 135 m höher als die Ebene von Botany Bay, von der aus der Rover den Aufstieg auf den Randhügel begann.
Die Techniker versuchten herauszufinden, welcher Teil des Flash-Speichers nicht mehr funktionierte, um ihn zu deaktivieren und den restlichen Speicher wieder nutzen zu können.
Nachdem der Flash-Speicher des Rovers drei Monate lang nicht benutzt wurde, um Fehler zu vermeiden, wurde der Speicher am 20. März neu formatiert. Zudem wurde die Software aktualisiert, sodass der Rover die wahrscheinlich defekte Speicherbank Nr. 7 nicht mehr benutzte. (Der Speicher des Rovers beinhaltet u. a. einen 256 MByte Flash-Speicher, eingeteilt in 7 Adressbereiche (Bänke).)[49] Am 27. März trat jedoch wieder ein „Amnesie“-Ereignis auf. Der eigentlichen Grund für diese Fehlfunktionen konnte damals nicht gefunden werden. Auch ließen sich diese nicht immer einer bestimmten Speicherbank zuordnen.[50]
Am 24. März 2015 hatte der Rover von der Landestelle aus eine Strecke von 42,195 km zurückgelegt und damit die Länge eines Marathons hinter sich gebracht.[51]
Das Marathon Valley wurde als wissenschaftliches Ziel ausgewählt, weil spektroskopische Aufnahmen aus dem Orbit hier offen liegendes Lehmgestein vermuten ließen. Bevor der Rover in das Tal einfuhr, wurde der Krater Spirit of St. Louis untersucht. Innerhalb dieses Kraters existierte eine Felsstruktur, die sich höher erhebt als der Kraterrand.
Am 25. April 2015 erreichte der Rover den 4000. Marstag (Sol) seit der Landung im Januar 2004.
Im Juni gab es wieder eine solare Konjunktion, in der der Mars aus Sicht der Erde hinter der Sonne vorbeizog. Währenddessen führte Opportunity einige Basisaktivitäten wie z. B. eine APXS-Untersuchung eines ausgewählten Objekts durch.[52] Nach der solaren Konjunktion wurde der Rover immer noch im „RAM-Only“ Modus betrieben, d. h., die ermittelten Daten wurden nicht in den Flash-Speicher kopiert.[53] Das Untersuchungsgebiet von April bis Juni war der Spirit of St. Louis-Krater am westlichen Rand des Endeavour-Kraters. Dieser hat einen verwitterten Kraterrand und einen zerfallenen Zentralberg, informell „Lindbergh“ genannt.
Die Energieproduktion der Solarzellen erreichte im ersten Halbjahr 2015 zwischen 395 und 620 Wh pro Sol.
Zweites Halbjahr 2015 (Sol 4063 bis 4241) – Einfahrt ins Marathon Valley

Anfang des 2. Halbjahrs 2015 begann der Rover die Einfahrt in das Marathon Valley.[54] Dieses erstreckt sich über 330 m von West nach Ost in den Endeavour-Krater hinein.[55]

Von den Orbitdaten ausgehend sollte sich hier die höchste Konzentration von Schichtsilikaten befinden. Um eine genauere Karte der Verteilung dieser Silikate zu bekommen, wurde das CRISM-Instrument auf dem MRO im ATO-Modus betrieben (Along-track oversample). Diese Technik erhöht die Auflösung der Daten von 18 m auf ungefähr 5 m pro Pixel. Damit können die Wissenschaftler die Orte der Silikate genauer bestimmen.
Die Route durch das Marathon Valley wurde so geplant, dass Opportunity im Marswinter am Südhang entlangfahren würde, damit hier die maximale Energieausbeute erreicht werden kann.
Im Juni arbeitete der Rover weiterhin im RAM-Only Modus, während das Flash-Dateisystem untersucht wurde. Am 18. Juli wurde es wieder aktiviert und funktionierte zunächst ganz gut; am nächsten Sol war es dem Rover jedoch nicht möglich, wieder vom Flash-System zu starten. Deshalb wurde wieder in den RAM-Only-Modus gewechselt. Dies erforderte jedoch, dass der Rover aktiv bleiben musste, bis die UHF-Verbindung jedes Sol aufgebaut werden kann. Wird hierfür der Mars Odyssey Orbiter benutzt, kam die Verbindung jeden Sol später zustande.[56]
Während des Marswinters konnte sich Opportunity mehr auf den MRO verlassen, da hier die Verbindung früher am Tag stattfinden konnte.
Eine zusätzliche Herausforderung, um die Funkverbindung mit den Orbitern aufzubauen, war die Position im Marathon Valley mit seinen hohen Wänden im Norden und Westen.
Am 25. September trat ein Reset des Rovers auf, der alle vorgesehenen Aktionen unterbrach. Der Grund des Reset wurde im Flash-System vermutet.
Im Dezember wurde der Rover auf einem steilen Abhang positioniert, um die Energieproduktion durch die Solarpaneele zu verbessern. Das Nahziel war, den Rover so zu positionieren, dass mit dem Steinschleifwerkzeug ein wichtiges Untersuchungsobjekt angeschliffen werden konnte. Dieses Objekt sollte Hinweise geben auf die Herkunft der spektralen Signatur von Lehmmineralien, die im Marathon Valley entdeckt wurden.
Bis zum 15. Dezember 2015 wurde eine Strecke von 42,65 km zurückgelegt.
Erstes Halbjahr 2016 (Sol 4242 bis 4419) – Marathon Valley


Im ersten Halbjahr 2016 fuhr der Rover im Marathon Valley insgesamt nur 260 m und kam auf eine Gesamtstrecke von 42,91 km. Ein Grund hierfür war die Winterzeit, mit der Wintersonnenwende am 3. Januar. In dieser Zeit wurden Objekte am Nordhang untersucht, um möglichst viel Energie durch die Solarzellen aufzusammeln. Es wurden mit dem Rock Abrasion Tool (RAT) Steine abgeschabt, um weitere Hinweise auf die spektrale Signaturen von Lehmböden zu bekommen.
Anfang Februar kletterte der Rover einen steilen Hang namens Knudsen Ridge hinauf, um dort Objekte mit hohem wissenschaftlichem Potential zu erreichen. Für diesen Zweck wurde auch ein Panorama dieses Hügels aufgenommen. Einige Objekte wurden mit der Mikroskop-Kamera eingehender untersucht. Aufgrund der starken Hangneigung (teilweise bis zu 32°, die bisher steilste Neigung mit der der Rover in seiner bisherigen Mission fahren musste) und lockerem Untergrund führten einige Fahrten zu einem erhöhten Schlupf, so dass diese Fahrten vom Rover abgebrochen wurden.
Im März erreichte er eine Gegend, die von den Marssatelliten als lehmreich erkannt wurde. Hiervon machte der Rover Aufnahmen mit der Panorama-Kamera unter Einsatz unterschiedlicher Filter. Hierdurch konnte die mineralogische Zusammensetzung der aufgenommenen Steine abgeschätzt werden. Ende Mai wurde mit einem Rover-Rad ein kleiner Graben gezogen, der dann mit der Mikroskop-Kamera und dem AXPS-Gerät genauer untersucht wurde. Die Messungen der Argon-Konzentration wurden weiterhin durchgeführt.
Mit der Navigationskamera wurden auch Aufnahmen für einen Wolkenfilm gemacht. Am 31. März konnte der Rover ein Foto eines Staub-Tornado (dust devil) aufnehmen. Diese sind im Endeavour-Krater wesentlich seltener als im Gusev-Krater, in dem Spirit stationiert war.
Ende Juni stand die Untersuchung des Marathon Valleys vor der Vollendung. Im Juni wurde die MER-Mission zum 10. Mal verlängert. Das zentrale Untersuchungsobjekt dieser erweiterten Mission sollte nun die Untersuchung einer kleinen Erosionsrinne („Gully“) im Endeavour-Krater sein.[57]
Zweites Halbjahr 2016 (Sol 4420 bis 4598) – Abschluss der Untersuchungen des Marathon Valley
Während der Fahrten an den steilen Hängen des Endeavour-Kraters wurden immer wieder autonome Fahrten abgebrochen. In einem solchen Fall führte das Team am nächsten Tag Tests durch, um die Ursache dafür zu finden. Meist war der Abbruch dann dem schwierigen Gelände zuzuordnen. Der Rover deutete steigende Widerstände an mindestens 3 Rädern als Anzeichen für das Einsinken der Räder in den Untergrund. Durch den sofortigen Stopp sollte ein Eingraben des Rovers wie im April 2005 verhindert werden. Hohe Steigungen belasteten die Motoren der Räder aber ebenfalls stärker, weswegen die Software bei diesen Fahrten fälschlicherweise eingriff.
Wenn es die Datenübertragungsrate erlaubte, wurde zusätzlich der Flash-Speicher ausgelesen, um Daten für die Fehlersuche zu gewinnen.
Im August fuhr der Rover zu einem Gebiet, in dem interessant erscheinende Rinnen aufgefunden wurden. Es wurde spekuliert, dass diese durch flussartige Ereignisse entstanden sein könnten. Ebenso wurden Stereo-Bilder aufgenommen. Hierzu fuhr der Rover zu zwei 5 m voneinander entfernten Punkten und erstellte mit seiner Panorama-Kamera Bilder in mehreren Wellenlängen. Mithilfe dieser Aufnahmen konnte das wissenschaftliche Team eine detaillierte digitale Höhenkarte des Terrains, welches die Rinnen enthält, erstellen.
Am 1. September (Sol 4482) fuhr Opportunity durch eine Lücke im Fels (genannt Lewis and Clark Gap) aus dem Marathon Valley heraus, um am Hang des Kraterrandes weitere Untersuchungen durchzuführen.
Wie auf dem Mars zu dieser Jahreszeit üblich traten Staubstürme auf. Keiner von ihnen bedrohte den Rover direkt, sie vermindern jedoch die Lichtdurchlässigkeit der Atmosphäre, was sich negativ auf die Energieproduktion des Rovers auswirkte (von 588 Wh am 15. August auf 515 Wh am 13. September).[58]
Bis Mitte November kam der Rover auf eine Gesamtstrecke von 43,51 km.[59]
Erstes Halbjahr 2017 (Sol 4599 bis 4774) – Fahrt zum Perseverance Valley
Anfang des Jahres wurde ein kleines Tal namens Willamette untersucht. Auf Bildern, die aus dem Orbit aufgenommen wurde, waren hier Rillen entdeckt worden. Der Rover hatte beim Fahren die Oberflächenschicht aufgewühlt und dort interessantes helles Material gefunden. Dies wurde mit dem AXPS und dem Mikroskop untersucht.
Im Januar machte sich der Rover auf, um einen Graben bzw. eine Rinne einen Kilometer südlich des aktuellen Standorts zu untersuchen. In dieser Umgebung war es jedoch schwierig, den Rover zu bewegen, da die Abhänge bis zu 20° steil waren. Zudem brach der Untergrund unter dem Gewicht des Rovers in loses Material auf. So gab es Abbrüche der programmierten Fahrten, weil ein Rad zu viel Leistung zog. Bei Analyse der danach aufgenommenen Bilder zeigte sich, dass das Oberflächenmaterial zerbröckelte und das Rad deshalb durchdrehte.
Die Rinne befindet sich am westlichen Rand des Endeavour-Kraters beim Cape Byron und ist ca. 200 m lang, jedoch nur einige dutzend Meter breit. Auf Orbitalbildern scheint es, als ob sie durch Wasser eingeschnitten worden sein könnte. Hierauf deuten verzweigende Kanäle hin. Ein kleiner, nahegelegener Krater, der dem Kraterrand überlagert ist, zeigt, dass die Rinne eine sehr alte geologische Formation mit einem Alter von 3 bis 4 Milliarden Jahren ist.[60]
Die Kommunikation erfolgte unter anderem auch über den MAVEN Orbiter.
Im Februar verließ Opportunity den Kraterrand, um in der flacheren Meridiani-Ebene schneller an sein wissenschaftliches Ziel zu kommen. Zudem erstellte der Rover ein neues Farbpanorama namens Rocheport.
Ende Februar zog ein paar hundert Kilometer westlich des Rovers ein Staubsturm auf, so dass die atmosphärische Durchlässigkeit an dessen Standort sank. Der Rover konnte jedoch seinen Weg südlich zum Perseverance Valley („Tal der Ausdauer“) im März fortsetzen.
Anfang Mai kam der Rover am Perseverance Valley an und begann damit, Stereoaufnahmen für ein detailliertes digitales Höhenmodell des Tals für die Routenplanung zu erstellen. Auf Aufnahmen aus dem Orbit ist auch im Perseverance Valley ein Kanal bzw. Graben zu sehen. Opportunity erstellte Panoramaaufnahmen der Gegend rund um den Rover, um die Morphologie des Kanals und dessen umgebende Strukturen zu dokumentieren.
Am 4. Juni war geplant, den Rover in einem kurzen Bogen rückwärts zu bewegen. Hier blockierte jedoch der Motor des linken Vorderrads. Das Rad blieb in einem Winkel von 33° ausgerichtet. Am 8. Juni sollte das Rad wieder gerade in Fahrrichtung ausgerichtet werden. Trotz unterschiedlicher getesteter Stromstärken konnte das Rad nicht bewegt werden. Die gleichen Tests mit dem rechten Hinterrad waren jedoch erfolgreich. Während das Team den Status des Rovers überprüfte und Lösungsmöglichkeiten ausarbeitete, wurden Aufnahmen mit der PanCam durchgeführt.[61] Nach einigen Tagen konnte das Problem behoben werden und der Rover konnte weiterfahren. Die Ursache des Problems ließ sich nicht klären.[62] Das Rad konnte nun so ausgerichtet werden, dass es geradeaus in Fahrtrichtung zeigt. Diese Ausrichtung des Rades vereinfachte die Steuerung des Rovers nun erheblich. Da seit April 2005 auch das rechte Vorderrad nicht lenken kann, wurde ab nun nur noch mit den hinteren Rädern gelenkt.[63]
Zweites Halbjahr 2017 (Sol 4775 bis 4953) – Perseverance Valley

Vom 22. Juli bis zum 1. August konnte die NASA keine Signale zu den Marssonden und -rovern senden, da der Mars zu dieser Zeit wie immer alle 26 Monate jenseits der Sonne die Position seiner Konjunktion passiert.[64] Opportunity wurde am oberen Rand des Perseverance Valley geparkt. Dort konnte der Rover die nächsten drei Wochen stehenbleiben, bis der den Funkkontakt störende Einfluss der Sonnenstrahlung ausreichend abgeklungen war. Zuvor wurden noch Tests zum Steuern der Räder durchgeführt.
Obwohl keine Kommandos gesendet wurden, konnten doch einige Daten von Opportunity an Sol 4797 empfangen werden. Diese eingeschränkte Datenmenge zeigte, dass sich Opportunity in einen Sicherheitsmodus versetzt hatte. Der Rover führte keine der programmierten Sequenzen mehr aus, bis er neue Anweisungen der Bodenkontrolle erhielt. Es wurde vermutet, dass ein Reset des Bordcomputers während der morgendlichen Kommunikationssitzung auf dem X-Band aufgetreten war. Der Rover war stabil und konnte die geplanten X-Band- und UHF-Relaiskommunikationen während des Rests der solaren Konjunktion durchführen. Eine genauere Untersuchung des Problems musste bis zur Wiederaufnahme der Kommunikation nach der Konjunktion warten.
Nach der solaren Konjunktion wurden nochmals Aufnahmen gemacht, die aufgrund des Resets während der Konjunktion verloren gegangen waren.
Durch den herannahenden Winter sanken die Energiewerte und der Rover war gezwungen, an einigen Tagen nur seine Batterien aufzuladen. Am 8. August betrug die Energieproduktion 319 Wh bei einer atmosphärischen optischen Dicke von ≈ 0,723 und einem Staubbedeckungsgrad (Staubfaktor) der Solarpaneele von 0,531. Die Strategie für die Fahrten war, das Tal abwärts zu fahren und an Stellen zu halten, die nach Norden geneigt sind oder sonnenbeschienen waren. Diese Strategie wurde „Lily-Pad“ genannt und sollte die bestmögliche Energieausbeute sicherstellen.[65] Die Energieproduktion reichte jedoch aus, während der Wintermonate Forschung zu betreiben. Bisher konnte noch nicht festgestellt werden, ob und wie viel Wasser bei der Entstehung des Perseverance Valley mitgewirkt hatte. Die Forscher erwarteten weitere Hinweise von den Ablagerungen am unteren Ende des Tals.[66]

{kind=link}
Am 18. Dezember betrug die gefahrene Strecke 45,08 km. Die Energieproduktion betrug 390 Wh, bei = 0,459 und einem Staubfaktor von 62,2 %. Zwischen dem 8. und 14. November wurden die Solarpaneele durch Wind teilweise vom Staub befreit, dadurch verbesserte sich die Energiesituation etwas.
Erstes Halbjahr 2018 (Sol 4954 bis 5129) – Staubsturm über dem Perseverance Valley

Anfang des Jahres bewegte sich der Rover entlang des nördlichen Abschnitts eines lokalen Strömungskanals. Durch weitere Reinigungsereignisse lieferten die Solarpaneele mehr Energie und der Rover konnte länger am Tag arbeiten, teilweise auch in der Nacht. Zudem konnte das AXPS über die Nacht betrieben werden.
Am 16. Februar 2018 wurde der 5000. Marstag seit der Landung auf dem Mars erreicht. Um dies zu zelebrieren, wurden mit der Mikroskopkamera am Ende des Roboterarms Aufnahmen gemacht, um ein „Selfie“ zu erstellen.
Auch wurde ein wissenschaftlich interessanter Gesteinsaufschluss namens „Aguas Calientes“ untersucht. Hierzu wurde das Rock Abrasion Tool (RAT) eingesetzt, welches ein 2 mm tiefes Loch in den Stein schleifen konnte. Von diesem Loch fertigte man mit der Mikroskopkamera ein Mosaik an. Mit dem APXS wurden dann über mehrere Sols Messungen durchgeführt. Zudem wurden mit der PanCam multispektrale Aufnahmen des Gesteins gemacht.
Der Staubsturm

(Quelle: Aufnahmen der Marc Color Imager (MARCI)-Kamera des Mars Reconnaissance Orbiter (MRO))
Im Juni 2018 kam in der Nähe von Opportunity ein lokaler Staubsturm auf.[67] Die ersten Zeichen des noch 1000 km entfernten Sturms wurden am 1. Juni 2018 vom MRO entdeckt. Weitere Wetterberichte vom MRO und dem Mars Color Imager Team deuteten auf einen länger andauernden Sturm hin. Dieser war zwar zu dem Zeitpunkt noch weit vom Rover entfernt, beeinflusste aber die atmosphärische Durchlässigkeit (Opazität) am dortigen Standort.

Innerhalb weniger Tage hatte sich der Sturm ausgedehnt. Auf Grund dessen wurden am 4. und 5. Juni Pläne entwickelt, um auf die zu erwartende niedrigere Stromversorgung vorbereitet zu sein. Seitdem hatte sich die Atmosphäre über dem Rover weiter getrübt. Am 3. Juni, dem 5105. Sol, generierten Opportunitys Solarpaneele noch 468 Wh. Die Optische Dicke der Atmosphäre betrug etwa 1,0, das heißt, nur etwa 37 % des ankommenden Sonnenlichts durchdringen die Atmosphäre.
Am 4. Juni ging bei = 2,1 die Energieversorgung auf 345 Wh zurück; am 6. Juni wurden nur noch 133 Wh erzeugt ( ≈ 3,0). Opportunity hat solche hohen -Werte seit dem letzten Staubsturm 2007 nicht mehr erlebt. Damals betrug ≈ 5,5. Der aktuelle Sturm bewirkte am 10. Juni 2018 ≈ 10,8 und überdeckte bereits eine Fläche von 41 Millionen Quadratkilometern, etwa so viel wie Nordamerika und Russland zusammen und somit ein Viertel der Marsoberfläche.[68][67]
Das Rover-Team erstellte einen weiteren Plan, bei dem der Rover am ersten Sol morgens nur die neuesten Kommandos bekommt und bis zum nächsten Morgen schläft. Danach wachte er am Nachmittag auf, um atmosphärische Messungen mit der Pancam durchzuführen und eine kurze Kommunikationssitzung mit dem MRO Orbiter durchzuführen. Wissenschaftliche Untersuchungen wurden jedoch eingestellt.
Der Rover benötigte den von Solarpaneelen erzeugten Strom, um die zentralen elektrischen Komponenten warm zu halten. Die Kälte wurde als Ursache dafür angenommen, dass Opportunitys Zwillingsrover Spirit im Jahr 2010 nicht mehr funktionierte.
| Für den Energiehaushalt der Rover Opportunity wichtige Größen von Sol 1 bis 5111: „Whr“: Energieproduktion in Wattstunden pro Sol (Wh/sol) „Tau“: für , optische Dicke der Atmosphäre „Dust Factor“: Staubfaktor, Bedeckungsgrad der Solarpaneele Diagramm oben: die jeweils minimalen Energiewerte, die im Laufe der Mission auftraten: Nach dem Staubsturm von 2007 fiel die Energieproduktion bis auf 240 Wh/sol ab. Im Marswinter 2010 wurde zeitweise nur 232 Wh/sol produziert. Bei Beginn des Staubsturms 2018 wurden nur noch 22 Wh/sol produziert. Diagramm Mitte: Während des Staubsturms 2007 stieg bis auf 4,12. Beim globalen Staubsturm 2018 stieg bis auf 10,8. Diagramm unten: Dust Factor 1 bedeutet unverdunkelte Solarpaneele |
 |
Solche Staubstürme sind zwar nicht überraschend, treten aber selten auf. Sie können innerhalb kurzer Zeit entstehen und dann Wochen bis Monate andauern. Während des südlichen Marssommers erwärmt das Sonnenlicht Staubpartikel und bringt sie höher in die Atmosphäre. Dadurch entsteht Wind, der wiederum mehr Staub aufwirbelt. Diese positive Rückkopplungsschleife versuchen die Wissenschaftler noch zu verstehen.
Opportunitys Team hatte zusätzliche Kommunikationszeiten von NASAs Deep Space Network angefordert, um aktuelle Daten von der Marssonde zu erhalten. Durch die erhaltenen Daten wurde festgestellt, dass die Temperatur des Rovers auf −29 °C gefallen war. Ein Vorteil eines Staubsturms könnte sein, dass die Temperaturunterschiede nicht mehr so stark ausfallen wie sonst auf der Marsoberfläche. Zudem absorbierte der aufgewirbelte Staub Sonnenstrahlung, sodass die Umgebungstemperatur am Standort Opportunitys erhöht wurde.[69][70]
Der Sturm wurde Ende Juni von der NASA als globaler Staubsturm („Planet-encircling Dust Event“ (PEDE)) eingeordnet. Wenn der Tau-Wert noch mehr gestiegen wäre oder die Staubbedeckung der Solarpaneele noch mehr zugenommen hatte, dann war es möglich, dass die Uhr des Rovers ebenfalls nicht mehr funktioniert hat. Ein Ausfall der Uhr hätte die Wiederherstellung der Funktionsfähigkeit komplizierter gemacht, aber nicht verhindert. Es war auch möglich, dass die Batterien durch das komplette Entladen einen Teil ihrer Gesamtkapazität verloren hatten, falls die Zellspannung auf beinahe Null gefallen war.
Es wurde jeden Tag nach Signalen des Rovers gehört. Da die Missionsuhr ausgefallen sein konnte, wurde auch während eines größeren Zeitfensters nach Signalen gelauscht. Zudem wurden Kommandos gesendet, mit denen der Rover im Wachzustand einen kurzen Signalton zurücksenden sollte. Es wurde nicht erwartet, dass der Rover sich meldet, so lange sich der Staubsturm nicht wesentlich beruhigt und sich die Atmosphäre wieder signifikant aufgeklärt hatte.[71]
Zweites Halbjahr 2018 (Sol 5130 bis 5308) – Ende des Staubsturms und Versuche der Kontaktaufnahme mit dem Rover
Seit dem 10. Juni hatte sich der bald 15 Jahre alte Rover nicht mehr gemeldet. Inzwischen war der Sturm in der Endphase, d. h., es fiel mehr Staub aus der Atmosphäre aus als neuer Staub aufstieg. Wenn der Himmel aufklaren würde, sollte sich der Rover wieder aufladen und versuchen, die Kommunikation wieder aufzubauen.
Ab Mitte Juli wurden Anzeichen entdeckt, dass sich der Staubsturm abschwächt. Die Bereiche, in denen Staub aufstieg, wurden kleiner und einige Oberflächenstrukturen wurden wieder sichtbar. Seit Mitte August wurde 3000 km um den Standort von Opportunity keine neuen Sturmaktivitäten entdeckt. Seither sank der -Wert. Wissenschaftler hatten mehrere Studien über den Status der Batterien vor dem Sturm und den Temperaturen vor Ort durchgeführt. Weil die Batterien in einem relativ guten Zustand waren, sollten sie nicht zu sehr in Mitleidenschaft gezogen worden sein. Zudem ist die Umgebungstemperatur während eines Staubsturms eher warm, deshalb sollte der Rover es warm genug haben, um den Sturm zu überleben.
Während des Sturms war der Staubgehalt der Atmosphäre auf ≈ 10,8 gestiegen; der übliche Wert liegt an diesem Ort auf dem Mars bei 0,5. Als sich der Sturm beruhigte, sank auf knapp über 2. Um die Roverbatterien wieder aufzuladen, war ein < 2 notwendig.
Es wurde mehrmals pro Woche mithilfe des Deep Space Networks versucht, mit Opportunity Kontakt aufzunehmen. Die Antennen sandten ein Ping-Signal während der Zeiten, in denen der Rover aufwachen sollte. Dann wurde versucht, Signale von Opportunity zu detektieren. Zusätzlich wurde mit den DSN-Antennen auch eine größere Bandbreite von Frequenzen abgehört.[72][73]
Erstes Halbjahr 2019 (Sol 5309 bis 5351) – Missionsende
Die Software des Rovers hatte wahrscheinlich mehrere Ausfälle verkraften müssen: Zu wenig Energie (low-power fault), eine falschgehende Missionsuhr (mission clock fault) und ein falschgehender Zeitgeber bei Kommunikationsausfall (up-loss timer).[74] Seit dem Verlust des Signals hatte das Team wiederholt dem Rover zu unterschiedlichen Zeiten, Frequenzen und Polarisationen mit dem Deep Space Network (DSN) nachgespürt. Hierbei wurde ein „sweep and beep“-Verfahren angewendet. Damit erhoffte man sich, die Komplexität eines Fehlers der Missionsuhr des Rovers zu berücksichtigen. Seit dem Verlust des Signals wurden über 1000 Wiederherstellungskommandos an den Rover gesendet.
Anfang 2019 begann am Ort des Rovers die Saison, in der wiederholt Cleaning Events auftraten. Somit wurde erhofft, dass solch ein Ereignis die Solarpaneele reinigt und der Rover dadurch seine Batterien wieder aufladen kann. Es konnte jedoch kein Kontakt aufgebaut werden. Deshalb gab die NASA die Versuche, Kontakt mit Opportunity aufzunehmen, am 13. Februar 2019 auf und beschloss das Ende der Mission.[75]
Untersuchte Objekte
Zusammenfassung
Kontext
Da die Meridiani Planum, in der Opportunity landete, sehr flach und eben ist, fallen Felsbrocken schon von weitem auf. Der Felsen Bounce Rock wurde bei Opportunitys Landung von dessen Airbag getroffen, daher sein Name. Er wurde am Sol 65 untersucht. Die Untersuchung der chemischen Zusammensetzung zeigte eine starke Ähnlichkeit zu den Shergottiten, einer Untergruppe der sogenannten Marsmeteoriten. Dies ist ein weiteres starkes Indiz dafür, dass die Marsmeteorite auch wirklich vom Mars stammen. Der Meteorit Heat Shield Rock wurde in der Nähe von Opportunitys Hitzeschild angetroffen (Sol 324) und ist der erste auf einem fremden Planeten entdeckte Eisen-Nickel-Meteorit (93 % Eisen, 7 % Nickel).[76]
Der Stein Santorini (untersucht Sol 1713 bis 1749) erwies sich als ein Eisen-Gesteins-Meteorit (Mesosiderit).[77] Er ist 6 cm × 8 cm groß und weist eine ähnliche Zusammensetzung wie die Objekte Barberton (Sol 122) (3 cm Durchmesser) und Santa Catarina (Sol 1045, 14 cm Durchmesser) auf. Es ist möglich, dass diese drei Gesteine Teil des Objekts waren, das den Victoria-Krater schuf. Der Meteorit Kasos wurde am Sol 1884 (12. Mai 2009) untersucht. Block Island wurde am Sol 1957 untersucht. Er ist ein 900 kg schwerer Eisenmeteorit. Ein solcher Körper ist zu schwer, um nach Durchquerung der heutigen Marsatmosphäre unbeschadet zu landen. Daher wird davon ausgegangen, dass früher der Mars eine dichtere Atmosphäre besaß, sodass der Meteorit weicher landen konnte. Mit der Mikroskopkamera wurden dreieckige Strukturen entdeckt, die Ähnlichkeiten zu Strukturen von Eisen-Nickel-Meteoriten auf der Erde haben (Widmanstätten-Strukturen). Diese Strukturen entstehen im Inneren durch extrem langsames Abkühlen über Jahrmillionen und werden an der Oberfläche sichtbar, wenn sie durch Wind und Sand geeignet erodiert werden. Zudem wurden lochartige Höhlen gefunden, anhand deren Struktur die Verwitterungsgeschichte des Meteoriten ermittelt werden kann.[78]
Am Sol 2020 (2. Oktober 2009) wurde ein weiterer Eisenmeteorit namens Shelter Island untersucht. Er hat einen Durchmesser von 47 cm und ist nur 700 m von Block Island entfernt. Auch dieser Meteorit ist stark verwittert, hat eine poröse Oberfläche und zeigt an seiner Oberfläche ebenfalls wie Block Island die Widmannstättenschen Figuren. Der Meteorit Mackinac wurde am Sol 2035 (16. Oktober 2009) erreicht. Er wurde nicht weiter im Detail untersucht, da auch dieser Meteorit ein Eisenmeteorit mit Ähnlichkeiten zu den vorigen untersuchten Objekten ist.
Der Stein Marquette Island wurde von November 2009 bis Januar 2010 untersucht. Auf Grund des geringeren Nickelgehalts als bei den anderen gefundenen Meteoriten wird angenommen, dass Marquette Island marsianischen Ursprungs ist. Der Stein enthält mehr Magnesium als die Basaltgesteine, die Spirit untersucht hatte. Marquette Island besteht aus grobkörnigem Gestein und Basalt. Diese Zusammensetzung deutet darauf hin, dass der Stein langsam abkühlte, weil so die Kristalle Zeit zum Wachsen hatten. Deshalb gehen Geologen davon aus, dass der Stein tief in der Marskruste entstanden ist.[79]

Pinnacle Island ist die Bezeichnung eines 2014 überraschend vorgefundenen Steins, der in Größe und Form einem Berliner Pfannkuchen ähnelt und der zwölf Marstage vorher dort noch nicht lag. Er ist vermutlich während eines Fahrmanövers durch ein Rad des Rovers dorthin katapultiert worden. Der Stein ist außen weißlich, im Zentrum rötlich. Der NASA-Wissenschaftler Steve Squyres sagte, es sei nicht vergleichbar mit allem, was man vorher gesehen habe. Das Innere sei sehr schwefel- und magnesiumhaltig. Der Stein enthalte zudem doppelt so viel Mangan wie die Forscher üblicherweise in den Marsproben gemessen hätten. Die weitere Untersuchung werde noch Wochen dauern.[80][81][82]
Wissenschaftliche Ergebnisse
Zusammenfassung
Kontext
Belege für ehemals flüssiges Wasser auf dem Mars
Hinweise vom Boden auf ehemals flüssiges Wasser auf dem Mars konnte die NASA erstmals am 2. März 2004 vermelden: Opportunitys Instrumente entdeckten hohe Schwefelkonzentrationen im Gestein, wie sie unter irdischen Bedingungen meist nur in Gips bzw. Anhydrit (beides Calciumsulfat mit unterschiedlicher Menge an Kristallwasser) zu finden sind. Gips- bzw. anhydrithaltiges Gestein entsteht auf der Erde fast ausschließlich durch Eindampfung mineralhaltiger Wässer und zählt daher zu den Evaporiten. Des Weiteren fanden die Instrumente des Rovers Jarosit, ein Eisen-Schwefel-Mineral, das auf der Erde ebenfalls nur unter Mitwirkung von Wasser entsteht. Auf der Erde ist das Vorkommen dieser Salze in den vorliegenden Konzentrationen ein eindeutiges Anzeichen dafür, dass das Gestein entweder in offen stehendem Wasser ausgefällt wurde oder über einen längeren Zeitraum hinweg Grundwasser ausgesetzt war. Diese Entdeckungen waren mit den beiden in Deutschland entwickelten, nur faustgroßen und damit extrem miniaturisierten Instrumenten APXS (Alpha Particle X-Ray Spectrometer) und MIMOS II (Miniaturisiertes Mößbauer-Spektrometer) möglich geworden. Das APXS vom Max-Planck-Institut für Chemie in Mainz ist ein Strahlungsdetektor, dessen Herzstücke, die Alpha- und Röntgenstrahlungshalbleiterdetektoren, von der Münchener Firma KETEK[83] entwickelt und hergestellt wurden. Das MIMOS II wurde an der Johannes Gutenberg-Universität Mainz entwickelt. Hochauflösende Nahaufnahmen der feingeschichteten Sedimente zeigten außerdem zentimetergroße tafelförmige Hohlräume, wie sie entstehen, wenn wasserlösliche Kristalle, etwa von Gips, anderen Sulfaten oder Dolomit wieder aus dem Gesteinsverband herausgelöst werden. Darüber hinaus wurden regelmäßig verteilte, millimetergroße und kugelrunde Mineralaggregate zunächst unbestimmter Zusammensetzung in großer Zahl im Gestein entdeckt, die bald als Konkretionen gedeutet werden konnten, wie sie in wässrigem Milieu entstehen. Dass die Kügelchen im Gestein selbst entstanden sind, konnte an den Lagerungsverhältnissen erkannt werden: sie liegen im Gestein, ohne die millimeterfeine Schichtung irgendwie erkennbar zu stören, was der Fall sein müsste, wären sie etwa als Gerölle oder vulkanischer oder meteoritischer Niederschlag von außen eingetragen worden. Etwas später konnten spektroskopisch hohe Hämatitkonzentrationen in diesen Konkretionen erkannt werden, was die obige Interpretation weiter erhärtete. Angesichts dieser Entdeckungen konnte die NASA von der Formation als ehemals soaking wet (tropfnass) sprechen. Zunächst war unklar, ob das Wasser an der ursprünglichen Entstehung der Schichten selbst beteiligt war, also am Ort offen an der Oberfläche stehend vorhanden gewesen war, oder ob die beobachteten Gesteinseigenschaften auf die nachträgliche Einwirkung unterirdischer Wässer (Grundwasser oder hydrothermale Lösungen) zurückzuführen waren.
Belege für ehemals offen stehendes bewegtes Wasser
 | Der Pfeil zeigt den Landekrater. Rechts am größeren Krater, dem nächsten Ziel der Sonde in etwa 1 km Entfernung, ist die helle Gesteinsformation schon von oben deutlich zu sehen. In der Ebene ist sie durch eine dünne Schicht aus Staub und Geröll bedeckt. |  | Formation aus geschichteten hellen Sedimentgesteinen am inneren Kraterrand. Bildbreite ca. 5 m |
 | Eine der kugeligen Hämatit-Konkretionen, blueberries genannt, die durch Ausfällung von Mineralien aus dem Wasser wuchsen. Kugeldurchmesser ca. 2 mm |
 | Typische Hohlräume im Gestein entstanden durch Herauslösen von tafeligen Sulfatkristallen. Bildbreite ca. 5 cm |
 | Kleinräumige Schrägschichtung belegt die Entstehung der Schichten in offen stehendem bewegten Wasser. Bildbreite ca. 5 cm breit |
Einer NASA-Mitteilung vom 23. März 2004 zufolge kann als sicher gelten, dass an der Landestelle früher ein offener flacher Salzsee oder Ozean bestanden hat. Der Rover konnte in einer Serie von über 200 Mikrofotos an einem Teilaufschluss der anstehenden Gesteinsschichten Sedimentstrukturen räumlich erfassen, deren irdische Äquivalente nur durch bewegtes Wasser entstehen (cross-bedding Schrägschichtung). Die Wissenschaftler interpretieren diese Gesteine als Reste einer ehemaligen Küstenlinie und weisen darauf hin, dass genau solche Ablagerungen, wie sie hier angetroffen wurden, eventuelle (Mikro-)Fossilien oder andere Spuren biologischer Aktivität hervorragend konservieren würden. Eine Rückkehr in die Gegend zum Zwecke einer automatisierten oder auch konventionellen Probennahme wäre damit sehr wünschenswert und auch wahrscheinlich. Auf Satellitenbildern ist zu erkennen, dass die in Frage stehenden Schichten, ein helles, feingeschichtetes Gesteinspaket, offenbar über mindestens mehrere tausend Quadratkilometer verbreitet sind.
Diskussion bisheriger Entdeckungen
Zusammenfassung
Kontext
Die Doppelmission der Mars Exploration Rovers darf als in technischer und wissenschaftlicher Hinsicht außerordentlich erfolgreich gelten. Sie knüpft damit an die größten historischen Erfolge der NASA an und steht in einer Reihe mit den bemannten Mondlandungen, den Pioneer-, Voyager- und Viking-Sonden und stellt damit eine technische Höchstleistung dar. Es ist zum ersten Mal der Nachweis direkt vor Ort gelungen, dass auch auf anderen Planeten flüssige Wasservorkommen und damit die Voraussetzungen für die mögliche Entstehung von Leben auf dem Mars existieren oder existiert haben. Erstmals wurden Sedimentgesteine eines fremden Planeten untersucht. Eine Neuheit war auch, dass Datenmaterial aus der Erkundung eines fremden Himmelskörpers über das Internet annähernd in Echtzeit öffentlich zugänglich gemacht wurde, noch bevor die Projektbeteiligten selbst es auswerten konnten. Die Untersuchung der chemischen Zusammensetzung von Bounce Rock, einem Stein, der von Opportunity bei der Landung beinahe getroffen worden wäre, zeigen eine starke Ähnlichkeit zu den Shergottiten, einer Untergruppe der sogenannten Marsmeteoriten. Dies ist ein weiteres starkes Indiz dafür, dass die Marsmeteorite tatsächlich vom Mars stammen.
Siehe auch
Quellen
- NASA: Mars-Rover-Webseite (englisch)
- NASA: Missionsdetails (englisch, PDF, 1,5 MB)
Weblinks
Commons: Opportunity – Sammlung von Bildern, Videos und Audiodateien
Wiktionary: opportunity – Bedeutungserklärungen, Wortherkunft, Synonyme, Übersetzungen
- NASA's Jet Propulsion Laboratory: Mars Exploration Rovers (englisch)
- NASA's Jet Propulsion Laboratory: Opportunity Updates (englisch)
- Raumfahrer.net: Mars Exploration Rover-Statusberichte (die offiziellen Statusberichte der NASA in deutscher Übersetzung)
- NASA's Jet Propulsion Laboratory: Opportunity: All 228,771 Raw Images (englisch)
- Daten zu Opportunity bei Solarviews (englisch)
- Wacht der Marsroboter jemals wieder auf?
Einzelnachweise
Wikiwand - on
Seamless Wikipedia browsing. On steroids.