Timeline
Chat
Prospettiva
Strumentazione di bordo
strumentazione di ausilio ai piloti per tutte le fasi di controllo e governo del volo Da Wikipedia, l'enciclopedia libera

Remove ads
La strumentazione di bordo[2][3][4] è una serie di strumenti a disposizione del pilota in grado di fornire tutte le informazioni principali e utili per mantenere in volo il proprio velivolo sulla rotta di navigazione, nonché delle relative apparecchiature di comunicazione per la gestione del traffico aereo che consentono di interagire con l'aereo.

Remove ads
I differenti tipi di strumenti
Riepilogo
Prospettiva
Gli strumenti di bordo utilizzano per la raccolta delle informazioni e la loro visualizzazione diversi principi di funzionamento tra cui: strumenti elettromeccanici, pneumatici, elettronici, radioelettrici e attraverso i satelliti GPS. Li si potrebbe classificare secondo il loro modo di funzionamento o attraverso le loro funzioni (informazioni di velocità, di altitudine in rapporto all'ambiente, di navigazione o altrettanto semplicemente per ordine alfabetico). La lista qui sotto non ha alcuna delle logiche elencate.
Bussola magnetica

La bussola mostra l'angolo di "prua" del velivolo rispetto al nord magnetico. Fornisce indicazioni corrette solamente in volo rettilineo livellato, dato che in caso di virata, salita, discesa, accelerazione o decelerazione è influenzata dall'inclinazione relativamente al campo magnetico terrestre e dalle forze d'inerzia che agiscono sui suoi componenti. Per questo motivo si usa anche la girobussola (o direzionale).
Strumenti aerodinamici (o a capsula)
Altimetro

L'altimetro mostra l'altitudine del velivolo confrontando la pressione all'interno di una capsula aneroide contenuta nell'altimetro con la pressione atmosferica ottenuta dall'impianto delle prese statiche. Può essere regolato con la effettiva pressione barometrica locale in modo da ottenere una lettura più precisa dell'altitudine.
Quando l'aereo sale la capsula aneroide si espande, dal momento che diminuisce la pressione statica. Al contrario, durante la discesa, la pressione statica aumenta e la capsula si ricomprime.
Anemometro

L'anemometro indica la velocità del velivolo (generalmente in nodi) rispetto all'aria circostante. Si basa sulla misura della pressione dinamica ottenuta dai tubi di Pitot.
Variometro

Il variometro misura la velocità verticale del velivolo (in piedi per minuto o metri al secondo) in base alla variazione della pressione statica. Il variometro indica la componente verticale della velocità dell'aeromobile (velocità ascensionale/discensionale, velocità di salita/discesa) espressa in centinaia o migliaia di piedi al minuto, ft/min (o in metri al secondo sugli alianti), fornendo quindi al pilota informazioni sul moto verticale (variazione di quota nel tempo) del velivolo.
Strumenti giroscopici
Girodirezionale
La girobussola (anche nota come girodirezionale o semplicemente direzionale), mostra la rotta del velivolo rispetto al nord geografico. Rispetto alla bussola magnetica ha il vantaggio di indicare il nord geografico (invece del polo nord magnetico) e di essere insensibile ai disturbi prodotti da campi magnetici perturbanti o forze d'inerzia, mentre come svantaggio richiede la presenza di un motore per mettere e mantenere in rotazione un rotore ed è soggetta a un effetto chiamato precessione e deve essere periodicamente riallineata usando una bussola magnetica. Sugli aerei più recenti è sostituita da un indicatore della situazione orizzontale (HSI).
Orizzonte artificiale

L'orizzonte artificiale, detto anche indicatore di assetto, è uno strumento giroscopico che permette di conoscere l'assetto di un aeroplano anche in condizioni di bassa visibilità e di notte. È quindi indispensable per il volo strumentale come indicazione per il beccheggio e per il rollio. Le indicazioni sul quadrante sono date da una barra che si dice stabilizzata nel piano dell'orizzonte vero da un giroscopio con tre gradi di libertà e da una sagomina d'aeroplano solidale con il velivolo.
Lo strumento utilizza un giroscopio controllato dalla forza di gravità, con il rotore rotante intorno all'asse verticale X-X, e affidato a un sistema di sospensione cardanica tale da permettere al giroscopio stesso libertà di rollio, di picchiata e di cabrata.
Il sistema di sospensione cardanica è così costituito: Il cerchio interno è imperniato lateralmente nella direzione Y-Y sul cerchio esterno il quale, a sua volta, è imperniato secondo l'asse longitudinale Z-Z del velivolo. Le tacche graduate e i triangoli bianchi sopra l'orizzonte indicano la posizione in virata del velivolo, integrando lo strumento anche la funzione di virometro o indicatore di virata.
Virosbandometro (Turn and Slip indicator / Turn and Bank indicator)


È uno strumento giroscopico a due gradi di libertà, che sugli aerei leggeri è associato a un indicatore di sbandamento privato della possibilità di ruotare attorno al suo asse verticale.[4]
È uno strumento doppio, formato da virometro e sbandometro. Il virometro misura la velocità della virata, esempio la virata standard di 3°/sec o 360°/2Min.
Lo sbandometro è come una livella che misura l'accelerazione, nello specifico la forza centrifuga e centripeta. Il bilanciamento delle due forze porta l'aereo a virare in modo coordinato e la pallina dello strumento si trova al centro.
Se una delle due forze prevale rispetto all'altra si avranno imbardate, scivolate e derapate.
Yaw string

È il più efficace e meno costoso indicatore di sbandamento / slittamento (slip/skid) a completamento dell'indicazione dello sbandometro. È costituito da un pezzo di filo montato in un luogo facilmente visibile al pilota, libero di fluttuare in ogni direzione. Lo Yaw String (stringa di imbardata) aiuta a coordinare i comandi al timone e agli alettoni. Quando i controlli sono correttamente coordinati, il filo è dritto, allineato con l'asse longitudinale della velivolo. Durante una virata in scivolamento, l'estremità della stringa d'imbardata sarà spostata verso l'esterno della curva. Per centrare la stringa di imbardata in una virata in scivolamento, è necessario agire sulla pedaliera del timone al contrario dell'estremità della stringa d'imbardata. Durante una virata in slittamento, l'estremità della stringa d'imbardata sarà spostata verso l'interno della curva. Per centrare il velivolo con la manovra in coordinamento è necessario agire sulla pedaliera del timone nella direzione dell'estremità della stringa d'imbardata[5].
Sistema di navigazione inerziale
Gyrolaser

Un gyrolaser o giroscopico ottico laser è un sensore per il controllo della velocità angolare, basato sul principio dell'effetto Sagnac. Può essere utilizzato in un sistema di navigazione inerziale, grazie all'accuratezza di misura e per l'assenza di parti in movimento.
Il giroscopio consiste di un corpo triangolare vitreo in cui sono ottenute tre canalizzazioni contigue e complanari tra i vertici, ermeticamente chiuse con specchi e riempite di gas attivo. All'interno delle canalizzazioni è raffigurabile la struttura di due laser a risonatore unico, uno a circuitazione oraria e l'altro a circuitazione antioraria.
Remove ads
Strumenti elettromagnetici
Riepilogo
Prospettiva
Radioaltimetro

È uno strumento che grazie alle proprietà delle onde radio di essere riflesse dalle superfici solide, calcola l'altezza dal suolo dell'aereo. Sapendo che le onde si propagano a velocità costante esso calcola il tempo che passa tra l'emissione di un segnale e il ricevimento dello stesso segnale che è stato riflesso dal suolo. Con un semplice calcolo (V=S/T) si ricava la S, spazio, che in questo caso è espressa in piedi, come altezza dal suolo. Lo strumento viene largamente impiegato per gli atterraggi di precisione. Il radioaltimetro misura l'altezza di volo dell'aeromobile riferita al punto inferiore delle ruote a carrello esteso. Il sistema si basa confronto tra un segnale in partenza da una antenna trasmittente posizionata sotto la fusoliera, con quello di ritorno riflesso dal suolo. Esistono due tipi di radioaltimetro: il primo funziona a modulazione di frequenza ed è impiegato per misurare altezze inferiori ai 2500 piedi, il secondo funziona a impulsi ed è chiamato radar altimetro, adatto alla misurazione d'altezze maggiori.[4]
Strumenti di radio-navigazione
Radiobussola (ADF - Automatic Direction Finder)

L'ADF o Automatic Direction Finder (Radiogoniometro Automatico) è l'apparecchiatura di bordo che sintonizzata con una stazione a terra fornisce al pilota automaticamente la posizione della stazione stessa rispetto all'asse longitudinale dell'aereo, definita Rilevamento polare o RIL.PO. Da questi ultimi si possono ricavare gli indispensabili: angolo di rotta magnetica da seguire per raggiungere la stazione radiogoniometrica o QDM, l'angolo di rilevamento rispetto al Nord magnetico o QDR, l'angolo di rilevamento rispetto al Nord vero o QTE e l'angolo di rotta vera da seguire per raggiungere la stazione radiogoniometrica QUJ. Il Qcode è uno standard, composto da un codice di tre lettere, inizialmente sviluppato per la comunicazione telegrafica e quindi utilizzato per le comunicazioni radio[6].
Oggi il suo utilizzo è sempre più relegato all'aviazione leggera e la tendenza è quella di sostituire tutti gli apparati con sistemi più moderni. La sua utilizzazione è legata all'esistenza a terra di radiofari (NDB = Non - Directional radio Beacon)[7]
VOR (VHF Omnidirectional Range)

Il Very High Frequency Omnidirectional Radio Range, più comunemente conosciuto come VOR, è un sistema di radionavigazione per aeromobili. Lo strumento dialoga con una stazione a terra VOR chiamata anche radiofaro che trasmette onde radio in VHF a 360 gradi nello spazio circostante. Dallo strumento il pilota può selezionare una di queste rotta aerea o aerovia tramite l'Omni-Bearing Selector o OBS e portare l'aereo in direzione alla stazione seguendo la rotta. Lo strumento fornisce inoltre le informazioni del TO (verso la stazione) e del FROM (dalla stazione). Viene di solito associato a un DME (Distance Measuring Equipment)[7].
RMI (Radio Magnetic Indicator)

Strumento composto dall'unione di una girobussola (direzionale) e di un ADF (Automatic Direction Finder) e pertanto possiede due indicatori a freccia che possono orientarsi contemporaneamente sia verso stazioni NDB (Non Directional Beacon) sia verso stazioni VOR (VHF Omnidirectional Range).
DME (Distance Measuring Equipment)


È uno strumento in grado di misurare la distanza che intercorre tra l'aereo e una stazione VOR al suolo. Esso sfrutta delle onde radio che, conoscendone velocità e il momento (tempo) di emissione, permette il calcolo della distanza, dalla stazione VOR. È importante considerare che la distanza dalla stazione VOR a terra DME che appare sull'indicatore è la lunghezza, in miglia nautiche, della linea immaginaria congiungente aereo - stazione DME a terra, definita in inglese “SLANT DISTANCE”. Il DME fornisce, quindi una distanza obliqua e non parallela al suolo e nel punto esatto in cui si sorvola la stazione non segna zero, ma una distanza che è pari all'ipotenusa del triangolo ideale tra altezza del velivolo e la stazione a terra[7].
ILS (Instrument Landing System)

È un sistema di avvicinamento strumentale di precisione in fase di atterraggio. Esso fornisce indicazioni sia sul piano verticale sia sul piano orizzontale. Sul piano orizzontale indica una radiale fondamentale (simile al VOR) che è allineata alla linea di mezzeria della pista. Questo modo è detto Localizer (LOC o LLZ).
Sul piano verticale indica il Glide Slope (GS), ossia la pendenza della traiettoria di planata ottimale (3°) da seguire per raggiungere il punto di contatto sulla pista.
Il pilota dispone di uno strumento con due barre che formano una croce, una associata al LOC e una al GS. In base alla loro reciproca posizione il pilota conosce la posizione dell'aereo rispetto alla traiettoria ottimale e andare a correggere eventuali errori.
GPS (Global Positioning System)
Sistemi di visualizzazione elettronica (EFIS - Electronic Flight Instrument System)
Remove ads
Sistema di gestione del volo
Riepilogo
Prospettiva
FMS - Flight Management System
Sistema del controllo del volo (AFCS - Automatic Flight Control System)
Pilota automatico

In generale è un servomeccanismo a catena chiusa, cioè dotato di feedback. È costituito da sensori, computer e da elettrovalvole che, lasciando passare l'olio in pressione, muovono le superfici. Le superfici (alettoni o stabilizzatore) agiscono sul trasduttore che traduce il movimento in segnale elettrico di controreazione: il feedback.
Il sistema autopilota si distingue in due sistemi di controllo e gestione:
- modo basico
- modo avanzato
In modo basico l'autopilota agisce in genere su due assi: il rollio (roll) e il beccheggio (pitch) mentre l'autopilota di ultima generazione in modo avanzato, agisce anche sul motore e sui sistemi di navigazione.

I giroscopi sono i sensori che posti sui due assi, rilevano la variazione di velocità e la variazione di quota. La variazione è costituita da un segnale elettrico in corrente alternata, in cui la fase indica la direzione dello spostamento mentre la quantità (nell'ordine di millesimi di volt, esprime la velocità della variazione). Il segnale (dell'ordine di millesimi di volt) proveniente dai sensori è confrontato con il segnale di controreazione, il quale è sfasato di 180° rispetto al segnale dei giroscopi, quindi la sommatoria dei due segnali viene elaborata dal computer e inviata alle valvole elettroidrauliche.
Nel cockpit il pilota può scegliere tra le diverse opzioni disponibili dal sistema AFCS:[8]

- l'A/P (autopilota)
- Throttle Hold (velocità costante attraverso la regolazione della potenza del motore)
- Altitude Hold (quota costante attraverso la regolazione delle superfici)
- HDG (Heading Hold - mantiene la direzione acquisita))
- TRK (Tracking Acquire/Hold - acquisisce/mantiene il livellamento o l'inseguimento)
- NAV (Navigation mode)
- FD (Flight Director)
Throttle Hold e Altitude Hold, agendo ambedue sullo stabilizzatore non è possibile inserire entrambe le funzioni. Oltre ad agire sull'asse del beccheggio (pitch) l'A/P agisce anche sull'asse del rollio (roll) per cambiare direzione, quindi l'A/P esegue una virata. Il sistema AFCS prevede l'ausilio del computer preposto alla navigazione il quale invia i segnali all'A/P per dirigersi nel luogo prescelto.
Il primo volo completamente automatico, compreso l’atterraggio e il decollo, fu effettuato nel 1954 da un aereo C-20 appartenente agli Stati Uniti che attraversò l’Oceano Atlantico. Questo è un grande passo per la tecnologia del pilota automatico che negli anni successivi continuerà a migliorare.
Direttore di volo (FD Flight Director)
Il Flight Director è uno dei modi del sistema pilota automatico di un moderno aeromobile commerciale quando attivo e sotto il diretto controllo dell'FMS, nello specifico “mantiene” angoli di banco con valori non superiori ai 25/30°. Al di sopra di FL (Flight Level) 310/320, per default detto angolo su input del FD, non supera i 15° allo scopo di evitare lo “stallo di alta velocità che potrebbe innescarsi ad alta quota con alti ratei di virata per velocità molto prossime alla velocità massima operativa (Vmo) per cui lo spazio di virata si espande e gli “anticipi” delle virate sui “fix” di rotta aumentano.[4]
Sistemi d'allarme
Avvisatore di stallo (Stall Warning System)

L'avvisatore di stallo è uno strumento che, al sopraggiungere della incidenza di stallo, invia avvisi luminosi e/o sonori in cabina per attrarre l'attenzione del pilota. Il sistema più semplice è quello ad aletta in quanto quando il bordo di attacco raggiunge l'incidenza critica o di stallo, avrà una certa posizione rispetto al flusso d'aria.
Alle normali incidenze questa aletta è rivolta in basso, ma all'approssimarsi dell'incidenza critica, in punto di distacco si sposta verso l'alto e attiva il circuito elettrico degli avvisatori. Solitamente gli allarmi si attivano 5-10 nodi prima di raggiungere l'incidenza critica. Si ricorda che lo stallo è funzione dell'angolo di incidenza, ma siccome vi è una condizione di reciprocità si fa largo uso del termine velocità di stallo.
Avvisatore di prossimità del suolo
GPWS, (ground proximity warning system - sistema di allarme di prossimità al suolo), è un dispositivo associato a un radar altimetro che, tra le tante funzioni, emette degli allarmi nel caso in cui il pilota scenda al di sotto di certe quote ritenute non sicure. Fornisce inoltre, attraverso voci sintetiche, azioni evasive per evitare il pericolo di collisione con il suolo (esempio, la parola "PULL UP" indica di alzare il muso e guadagnare quota).
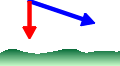 Funzionamento "Modo 1". La freccia rossa indica la traiettoria del velivolo mentre quella blu indica quella calcolata dal GPWS per evitare la collisione con il terreno.
Funzionamento "Modo 1". La freccia rossa indica la traiettoria del velivolo mentre quella blu indica quella calcolata dal GPWS per evitare la collisione con il terreno.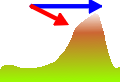 Funzionamento "Modo 2". La freccia rossa indica la traiettoria del velivolo mentre quella blu indica quella calcolata dal GPWS per evitare la collisione con il terreno.
Funzionamento "Modo 2". La freccia rossa indica la traiettoria del velivolo mentre quella blu indica quella calcolata dal GPWS per evitare la collisione con il terreno. Funzionamento "Modo 3". La freccia rossa indica la traiettoria del velivolo mentre quella blu indica quella calcolata dal GPWS per evitare la collisione con il terreno.
Funzionamento "Modo 3". La freccia rossa indica la traiettoria del velivolo mentre quella blu indica quella calcolata dal GPWS per evitare la collisione con il terreno. Funzionamento "Mode 4". Avverte i piloti che il loro inviluppo di volo non è compatibile con la configurazione di volo oppure la velocità attuale.
Funzionamento "Mode 4". Avverte i piloti che il loro inviluppo di volo non è compatibile con la configurazione di volo oppure la velocità attuale. Funzionamento "Modo 5". La freccia rossa indica la traiettoria del velivolo mentre quella blu indica il glide slope (sentiero di discesa).
Funzionamento "Modo 5". La freccia rossa indica la traiettoria del velivolo mentre quella blu indica il glide slope (sentiero di discesa).





Dispositivo anticollisione

TCAS o ACAS (Traffic Collision Avoidance System -Airborne CAS), in italiano Sistema di Allerta del Traffico ed Elusione di Collisione, è un dispositivo associato al transponder e funziona con i principi del radar secondario. Esso è in grado di rilevare gli aeromobili equipaggiati con transponder modo C presenti entro un'area di scanning. I dati rilevati vengono presentati al pilota come posizione e quota dei traffici rilevati. Il pilota può quindi scegliere una corretta manovra per evitare collisioni.
I sistemi TCAS moderni dispongono inoltre avvisi con voci sintetiche che suggeriscono la manovra da compiere (esempio, "Traffic, climb" indica la presenza di un traffico e si suggerisce di salire per evitarlo).
Remove ads
Note
Voci correlate
Altri progetti
Wikiwand - on
Seamless Wikipedia browsing. On steroids.
Remove ads